Inside NAO
Inside NAO
![]() by nicolas gomez
by nicolas gomez
Mon Dec 26, 2011 5:55 pm
Hi everybody i want to share more info about Nao robot.
First generation of robot


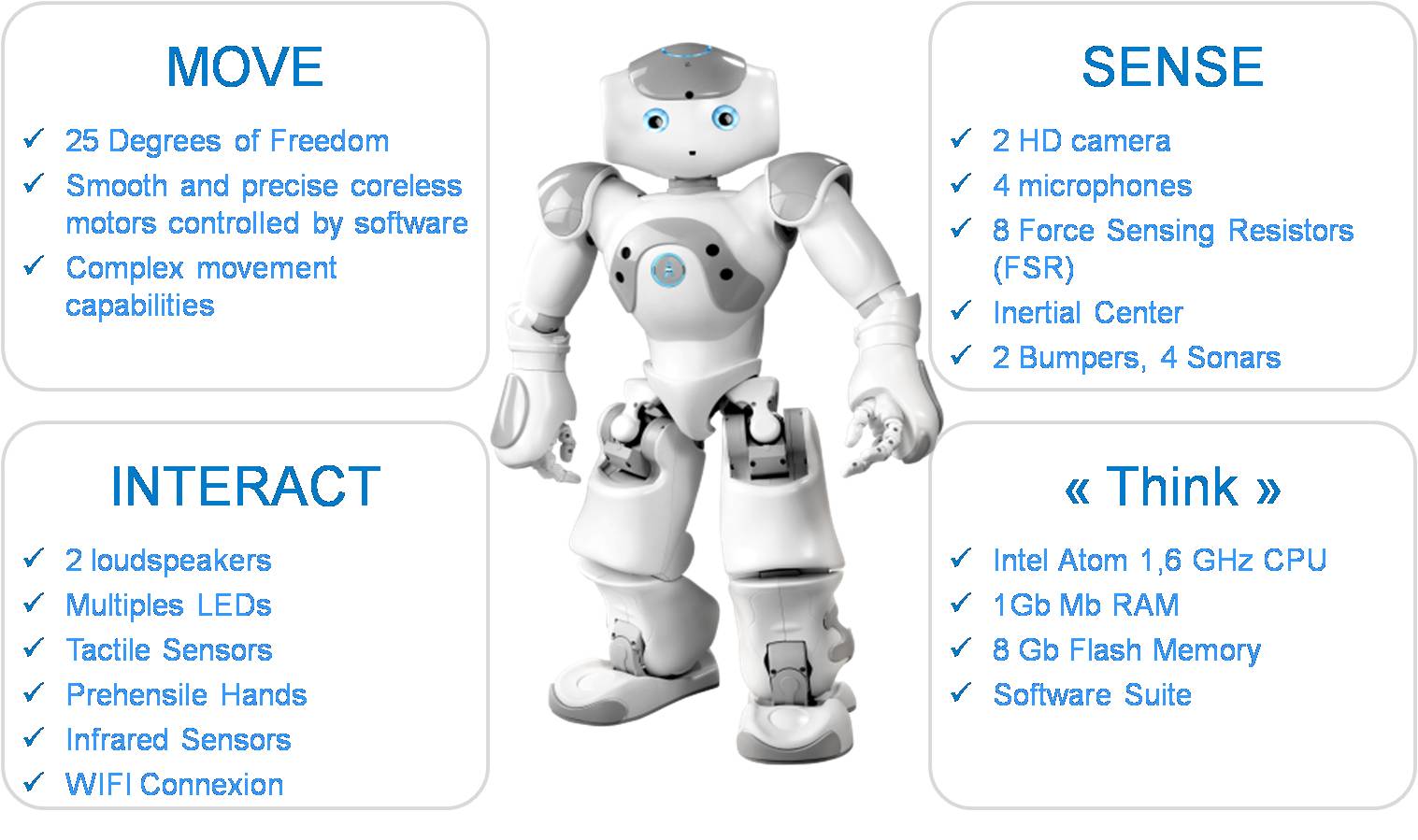
Features
Software Architecture

Software Suite

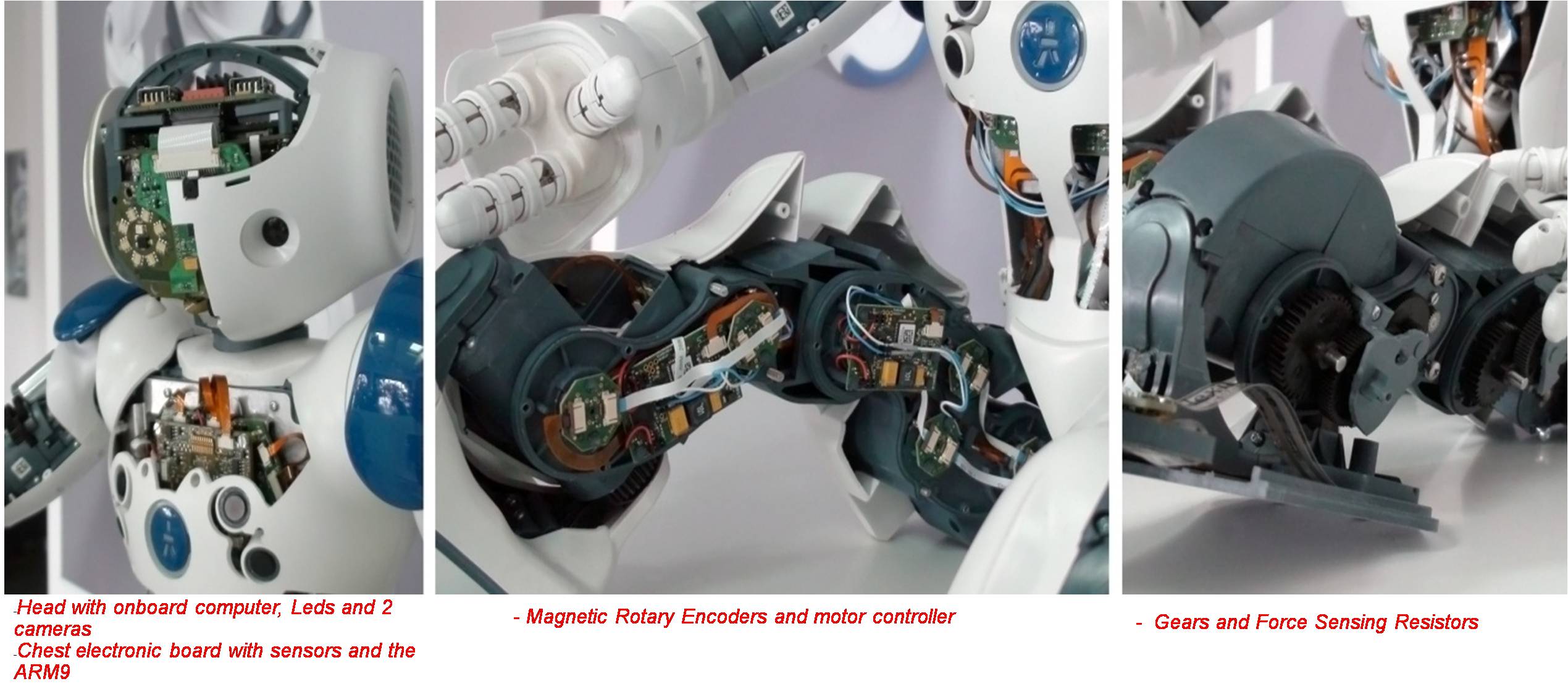
Inside NAO
Hearing, Touching and Vision

Head with Hokuyo Laser Scanner

Inertial Sensors and FSR

Electronic architecture

Motors and position sensors

Mechanical Ankle


4 Force Sensitive Resistors (FSR)


PIC Microchip microcontroller based board
RGB LED
4 Force Sensitive Resistors (FSR)
2 Bumpers
Re-mapable Communication Inputs / Outputs
In Circuit Serial Programmer port
Documentation : Quick start guide, BOM, …
Electronic schematics
Layout files & Gerber files
RS485/USB communication cable
12 short FSR, 12 large FSR
Motor Data
http://robosavvy.com/Builders/Niko2009/RE-max-17-216008_11_EN_122.pdf
And to pleople that want control de movents of nao it can done using Robotstadium it allow use a NaoV3R and DARwIn-OP Models

Programming - Setup
In order to develop a robot controller for the Robotstadium contest, you will need to download and install the FREE version of the Webots software. The FREE version is available from the Cyberbotics web site. Webots is available for Linux, Mac OS X and Windows:
http://www.cyberbotics.com/products/webots/download.htm
You do not need to register for the "30 days full featured version", but you can if you want. If you register, your copy of Webots will be temporarily turned into a fully featured PRO version for a period of 30 days non-renewable. After the 30 days it will automatically turn back into a FREE version.
Additional Software
You will need to install separate software development tools for the programming language you choose:
Java
If you choose to develop your controller in Java, you will need to install the Java Development Kit (JDK) for Java Standard Edition (SE). This software is freely available from Sun Microsystems: http://java.sun.com/javase. You will find more info about the Java installation for Webots here.
Python
Webots is compatible with Python 2.6. If you want to develop your controller in Python, you will find more information here.
C/C++
If you choose to develop a C/C++ controller, you will need a C/C++ compiler. On Windows, a free compiler (MinGW) is packaged and configured with Webots distribution, so no extra installation is required. On Mac OS X, you will need to install the Xcode developer tools. Xcode is available for free from http://developer.apple.com/tools. On Linux, you will just need to install the GNU C Compiler (gcc) and/or the GNU C++ Compiler (g++) package.
Although you can develop and test your C/C++ controllers on Windows and Mac OS X, please note that the final version that you upload to this server must be compiled as a Linux 32-bit or 64-bit binary. Please find more info in the Programming -> Upload section.
http://robotstadium.org/index.php?option=com_content&task=view&id=6&Itemid=10
First generation of robot
Features
Software Architecture
Software Suite
Inside NAO
Hearing, Touching and Vision
Head with Hokuyo Laser Scanner
Inertial Sensors and FSR
Electronic architecture
Motors and position sensors
Mechanical Ankle
4 Force Sensitive Resistors (FSR)
PIC Microchip microcontroller based board
RGB LED
4 Force Sensitive Resistors (FSR)
2 Bumpers
Re-mapable Communication Inputs / Outputs
In Circuit Serial Programmer port
Documentation : Quick start guide, BOM, …
Electronic schematics
Layout files & Gerber files
RS485/USB communication cable
12 short FSR, 12 large FSR
Motor Data
http://robosavvy.com/Builders/Niko2009/RE-max-17-216008_11_EN_122.pdf
And to pleople that want control de movents of nao it can done using Robotstadium it allow use a NaoV3R and DARwIn-OP Models
Programming - Setup
In order to develop a robot controller for the Robotstadium contest, you will need to download and install the FREE version of the Webots software. The FREE version is available from the Cyberbotics web site. Webots is available for Linux, Mac OS X and Windows:
http://www.cyberbotics.com/products/webots/download.htm
You do not need to register for the "30 days full featured version", but you can if you want. If you register, your copy of Webots will be temporarily turned into a fully featured PRO version for a period of 30 days non-renewable. After the 30 days it will automatically turn back into a FREE version.
Additional Software
You will need to install separate software development tools for the programming language you choose:
Java
If you choose to develop your controller in Java, you will need to install the Java Development Kit (JDK) for Java Standard Edition (SE). This software is freely available from Sun Microsystems: http://java.sun.com/javase. You will find more info about the Java installation for Webots here.
Python
Webots is compatible with Python 2.6. If you want to develop your controller in Python, you will find more information here.
C/C++
If you choose to develop a C/C++ controller, you will need a C/C++ compiler. On Windows, a free compiler (MinGW) is packaged and configured with Webots distribution, so no extra installation is required. On Mac OS X, you will need to install the Xcode developer tools. Xcode is available for free from http://developer.apple.com/tools. On Linux, you will just need to install the GNU C Compiler (gcc) and/or the GNU C++ Compiler (g++) package.
Although you can develop and test your C/C++ controllers on Windows and Mac OS X, please note that the final version that you upload to this server must be compiled as a Linux 32-bit or 64-bit binary. Please find more info in the Programming -> Upload section.
http://robotstadium.org/index.php?option=com_content&task=view&id=6&Itemid=10
phpBB [media]
phpBB [media]

Re: Inside NAO
![]() by bonmot
by bonmot
Thu Jan 09, 2014 4:17 pm
Great pictures, hard to find any inside pictures on the NET.

Re: Inside NAO
![]() by Noblitt
by Noblitt
Fri Aug 11, 2017 7:04 am
I love the design of this robot. Looks very friendly. Any updates on the project?
Read the bingo views website to learn more!
