problems calibrating havimo2.0
problems calibrating havimo2.0
![]() by pheonix143
by pheonix143
Tue Nov 01, 2011 7:55 am

Re: problems calibrating havimo2.0
![]() by HGM
by HGM
Tue Nov 01, 2011 7:22 pm
pheonix143 wrote:hi hamid.. i am using the havimo2.0 and i have connect it to ttl. however i cant get the camera to ping. thanks.
I've just gone through the process and it worked for me.
I wasn't able to get the GUI working properly with just a TTL connection. What worked in my case was a serial RS-232 connection between the USB2Dynamixel and CM-510 and then attaching the camera to one of the ports.
I found the s/w fairly slow and somewhat unstable but if I waited long enough the right things usually happened. That may have something to do with my setup or system.
I set the "Connection Type" to CM-510 and had to wait quite a while for a "Connection Port" number to show up. After that everything else worked.
Perhaps Hamid can add his own comments to this to clear up any misstatements I may have made.
Harry

![]() by pheonix143
by pheonix143
Wed Nov 02, 2011 5:19 am
Still no Ping Response. I am wondering how I can check if the camera is working at all.
problems calibrating havimo2.0
![]() by pheonix143
by pheonix143
Wed Nov 02, 2011 5:19 am
Still no Ping Response. I am wondering how I can check if the camera is working at all.
Re: problems calibrating havimo2.0
![]() by hamid_m
by hamid_m
Wed Nov 02, 2011 9:26 am
HGM wrote:pheonix143 wrote:hi hamid.. i am using the havimo2.0 and i have connect it to ttl. however i cant get the camera to ping. thanks.
I've just gone through the process and it worked for me.
I wasn't able to get the GUI working properly with just a TTL connection. What worked in my case was a serial RS-232 connection between the USB2Dynamixel and CM-510 and then attaching the camera to one of the ports.
I found the s/w fairly slow and somewhat unstable but if I waited long enough the right things usually happened. That may have something to do with my setup or system.
I set the "Connection Type" to CM-510 and had to wait quite a while for a "Connection Port" number to show up. After that everything else worked.
Perhaps Hamid can add his own comments to this to clear up any misstatements I may have made.
Harry
Hi Harry, Hi Pheonix
There may still be some bugs in the TTL part of the GUI, as it is just a few days old. I will look after them.
For the CM5/510 connection, after clicking the connect button, the program sends a TOSS command to the controller and waits for its response. This can take a few seconds. Maybe I should add a progress bar or something showing that the process is going on. There is also one needed when downloading the image form the camera.
One important thing is that you need to reduce the latency of your USB2Dyn to 1ms to have the fastest connection speed. See the documentation of the USB2Dyn for more info.
I will work further on the improvements.
Best regards,
Hamid.

![]() by pheonix143
by pheonix143
Wed Nov 02, 2011 9:32 am
i have already reduced the latency to 1ms. i am using robobuilder RBC to operate havimo instead of robotis. in addition i have also tried to update my driver. however i still recieve no reponse from the camera itself. its says no ping response in the gui. pls assist. thanks!
![]() by pheonix143
by pheonix143
Wed Nov 02, 2011 10:09 am
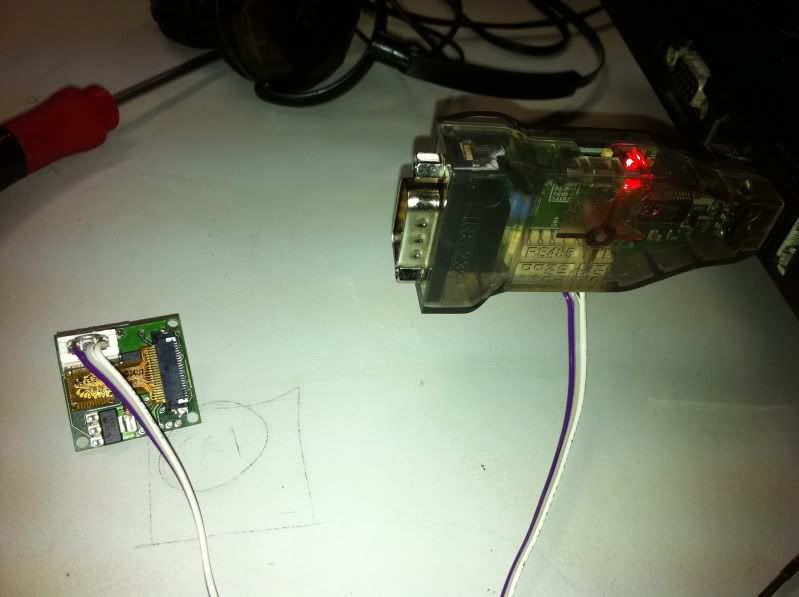
the picture below is showing the connections that i tried using the RBC controller with havimo. in addition i also tried to short the 2 pins as instructed by the manual.

the last one pic shows what is shown on the GUI
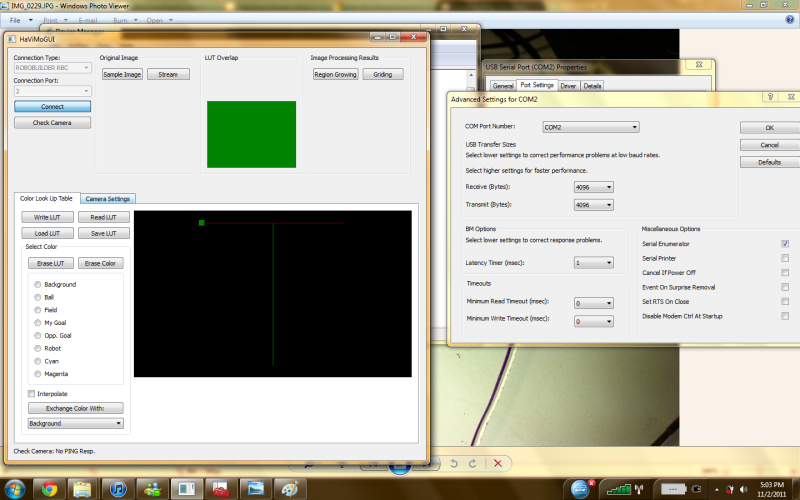
thanks hamid. [/url]
![]() by hamid_m
by hamid_m
Wed Nov 02, 2011 12:19 pm
In the first configuration there are two mistakes:
if you use a USB2Dyn to connect to the module you don't need the short circuit anymore.
Also the module should be powered somehow one way is to use SMPS2Dynamixel. The other is to connect USB2Dyn through a CM5 or CM510 to the HaViMo.

For the Robobuilder connection you don't need the power part as it is supplied by the controller, but the short circuit is needed in this mode.
Best regards,
Hamid.
![]() by pheonix143
by pheonix143
Thu Nov 03, 2011 6:01 am
just to clarify i am using robobuilder so do i still need to buy a cm5 or cm150 to connect to havimo??
either way i still can use the robobuilder RBC to calibrate havimo right?
in addition i have short circuit the TTL however there is still no ping response.
thanks for all the assistance you have given me hamid.. really appreciated it.
best regards.
Kai