Autonomous robot's navigation


![]() by XeaX
by XeaX
Tue Feb 21, 2012 12:09 pm
Robot specs
* Dimensions: 280x235x180mm (WxLxH)
* Wheels: D=105mm, W=38mm
* Ride height: 30mm
* Weight: 2-3kg:
o 2.9kg (LiPol 3S*5Ah, nettop Pegatron Intel Atom D525, 2Gb RAM, 250Gb HDD)
o 2.1kg (LiPol 3S*5Ah, DIR-320)

![]() by EDV
by EDV
Thu Mar 01, 2012 9:57 pm

Playing with Twinky rover

Object tracking

![]() by EDV
by EDV
Thu Apr 05, 2012 1:13 pm
![]() by EDV
by EDV
Sat Apr 21, 2012 8:17 pm
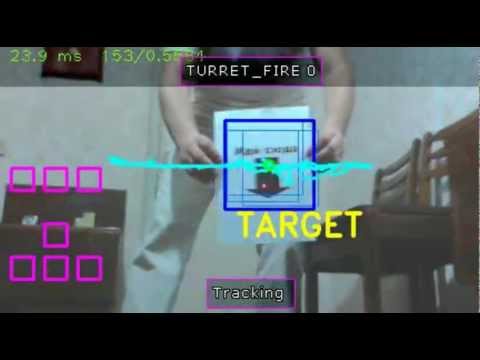
Object tracking with variable servo speed
See VBScript program for more details.
plingboot wrote:I've had a 'fiddle' with AVM navigator and managed to teach it a few objects/faces, but not the first idea how to turn that into tracking commands…
It is easy. You should just use "Object recognition mode" in AVM Navigator module.
First clear the AVM search tree by click on button "Set key image size(New)" and further press "Yes".
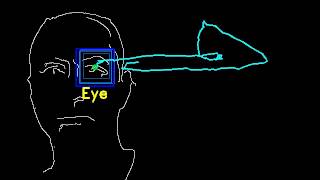
Now you can train AVM on some faces like in video below:
Face training demo

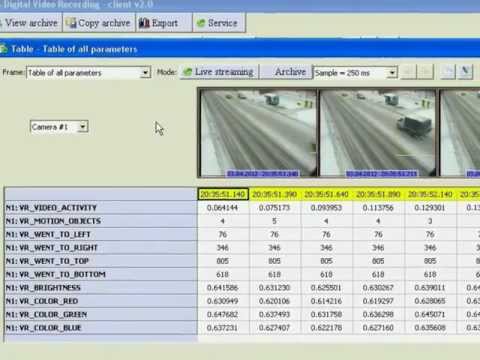
When training will be done you should use variables that described below for your VBScript program:
NV_OBJECTS_TOTAL - total number of recognized objects
NV_ARR_OBJ_RECT_X - left-top corner X coordinate of recognized object
NV_ARR_OBJ_RECT_Y - left-top corner Y coordinate of recognized object
NV_ARR_OBJ_RECT_W - width of recognized object
NV_ARR_OBJ_RECT_H - height of recognized object
As example you can use these VBScript programs that was published in this topics:
http://www.roborealm.com/forum/index.php?thread_id=3881#
http://forums.trossenrobotics.com/showthread.php?4764-Using-of-AVM-plugin-in-RoboRealm&p=48865#post48865

![]() by EDV
by EDV
Mon Oct 08, 2012 11:20 am
Changes:
- The indication drawing was carried to ::Annotate method
- Into camera view was added 3D marker of target position of robot

...
See here about all other changes.
![]() by EDV
by EDV
Tue Oct 09, 2012 7:01 pm

It's little demo of object recognition and learning from motion with helping of AVM Navigator.
All object rectangle coordinates are available in RoboRealm pipeline from external variables:
NV_ARR_OBJ_RECT_X - left-top corner X coordinate of recognized object
NV_ARR_OBJ_RECT_Y - left-top corner Y coordinate of recognized object
NV_ARR_OBJ_RECT_W - width of recognized object
NV_ARR_OBJ_RECT_H - height of recognized object
So you can use it in your VBScript program.
See here for more details.
![]() by EDV
by EDV
Thu Oct 11, 2012 8:44 am
Alan wrote:Hi,
I noticed in the youtube video that you jiggle the object (your face or the book) slightly during the learrning phase. Is this an advantage?
Cheers,
Alan
In fact the AVM algorithm is not invariance to rotation and you should show the object for memorizing to AVM search tree under different angles during training for further correct recognition.
See also an example of using of Canny module as background for AVM Navigator:


Re: Autonomous robot's navigation
![]() by EDV
by EDV
Mon Jan 06, 2014 3:28 pm
I'm still working over AVM technology. Now I've founded my own company that is named Invarivision.com.
We are small but passionate team of developers that are working over system which would be able watch TV and recognize video that interests user.
And we need your help!
It seems that interface of our search system is good enough because we try to make it to be simple and user friendly but from other point of view it could be a total disaster.
Could you please take a look to our system and then tell us about good and bad sides of this?
The constructive criticism is welcome.
With kind regards, EDV.
Re: Autonomous robot's navigation
![]() by EDV
by EDV
Tue Jan 07, 2014 12:52 pm
Cbenson wrote:This is quite different from autonomous robot navigation.
Our search system also is the robot that watches TV like a human but does it simultaneously on several TV channels and this robot can watch TV nonstop and do not to get tired
Cbenson wrote:Can you explain more about how the system would determine what video interests the user?
The user just uploads video which interests him to the search system and then system would search it on all channels that are scanned.
Also user can add own TV channel that interests him if system still does not have such channel.
So, in other words: AVM Video Search system provides service that allows customers to make audit of TV channels or searching of forbidden or copyrighted video in file with help of automatically recognition of the video content.
The main advantage of this system is direct recognition of separate images into analyzing of video content that is provide searching of very small video fragments about two seconds long.