Here another application bldc motors to robotics
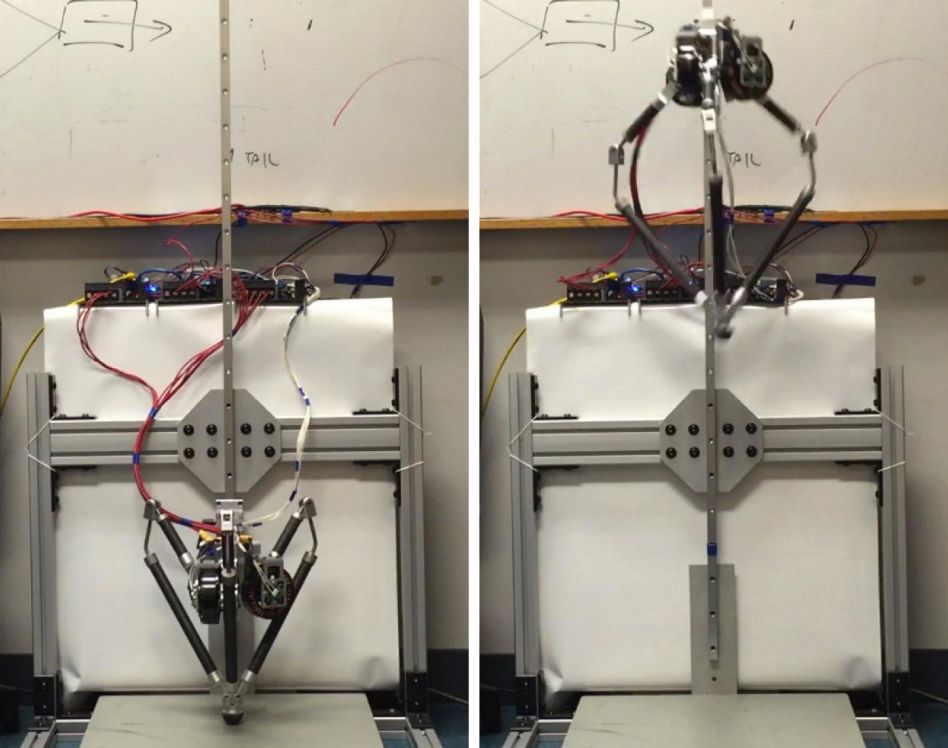
GOAT: A Legged Robot with 3D Agility & Virtual Compliance by Simon Kalouche

phpBB [media]
here his thesis work, which explains everything in more detail
http://www.ri.cmu.edu/pub_files/2016/8/kaloucheThesis.pdf
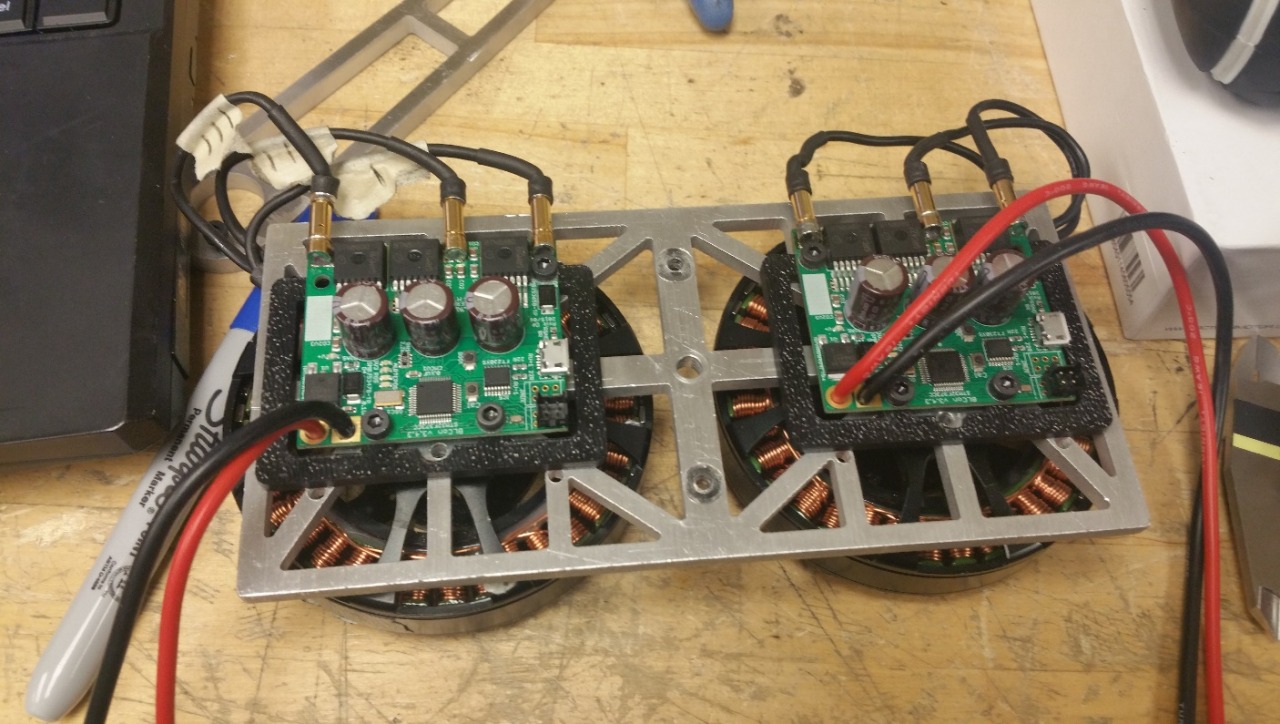
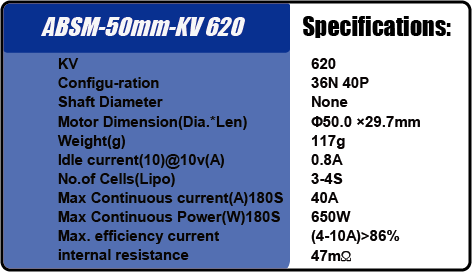
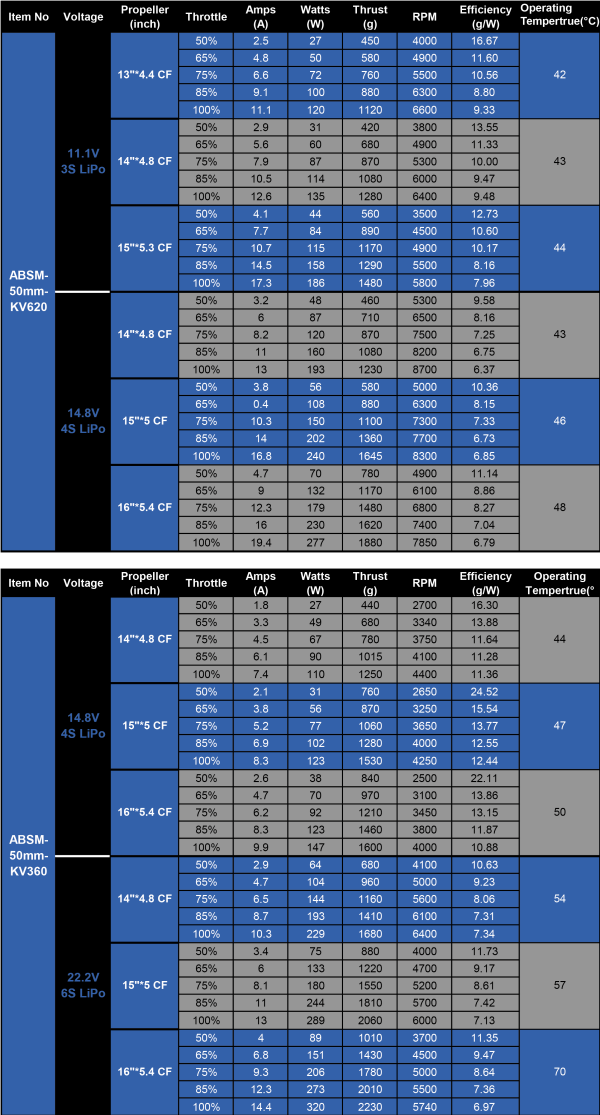
and finally Pancake MultiRotor BLDC
phpBB [media]



http://alturn-usa.com/products/ABSM-42mm-KV650.htm
can be buyer from
https://www.amazon.es/s/ref=bl_dp_s_web_599385031?ie=UTF8&node=599385031&field-brandtextbin=Alturn+USA
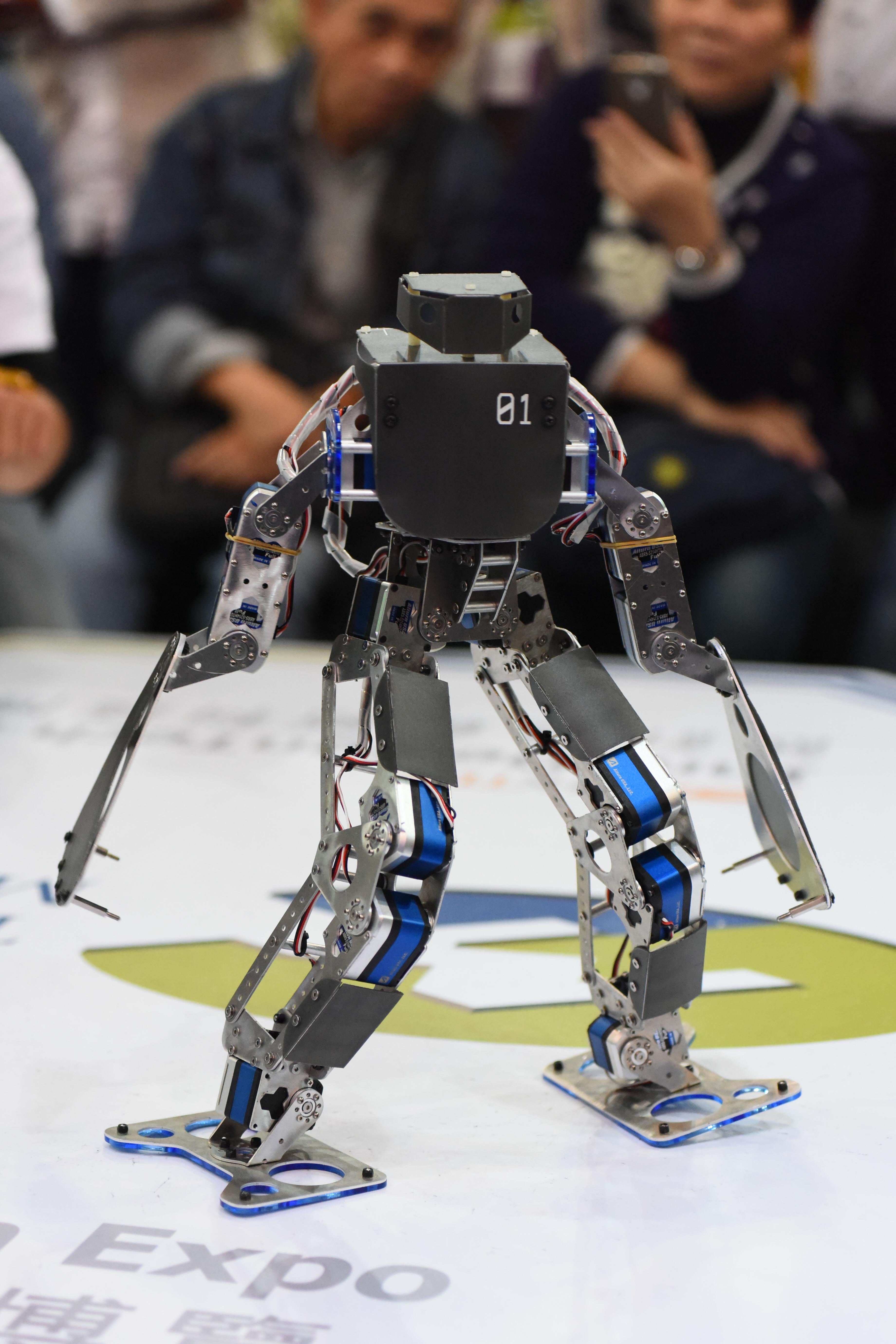
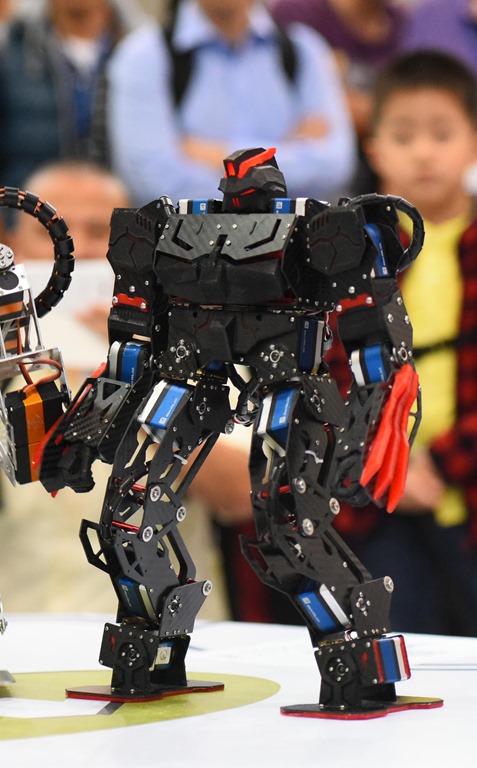
Also they have high torque digital servo motors
ABRS-5314HTG+Full HV - Kondo Size (43 × 32× 32.5 mm)
Stall Torque
Torque At 12V: 53.1kg/cm , 708z/in
Speed At 12V: 0.14sec / 60 deg at no load
Torque At 8.3V: 32.4kg/cm , 466oz/in
Speed At 8.3V: 0.16sec / 60 deg at no load
Torque At 7.4V: 25.1kg/cm , 348oz/in
Speed At 7.4V: 0.18sec / 60 deg at no load
link for complete features:
http://alturn-usa.com/products/PDF/ABRS-5314HTG+HV.pdf
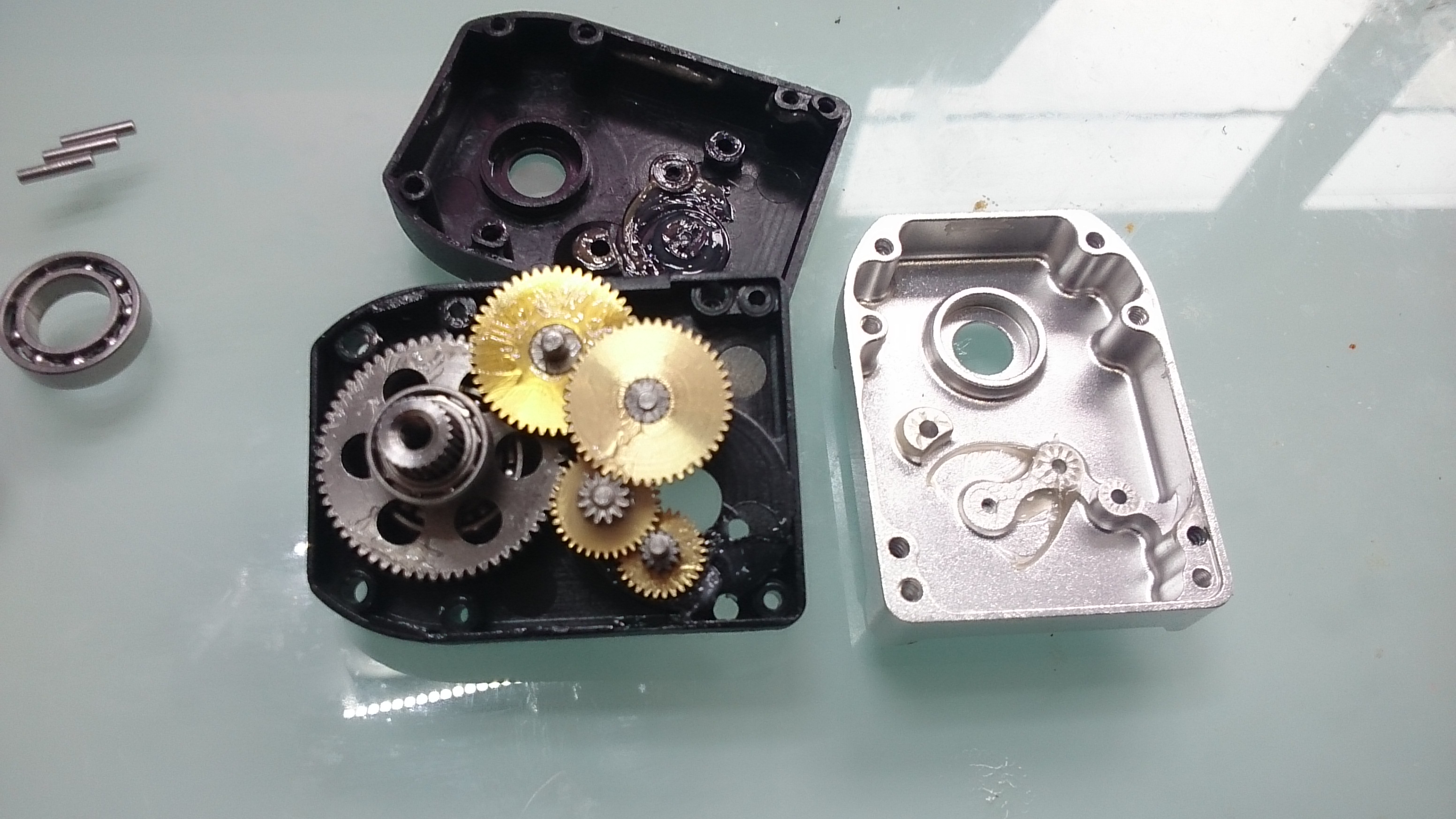
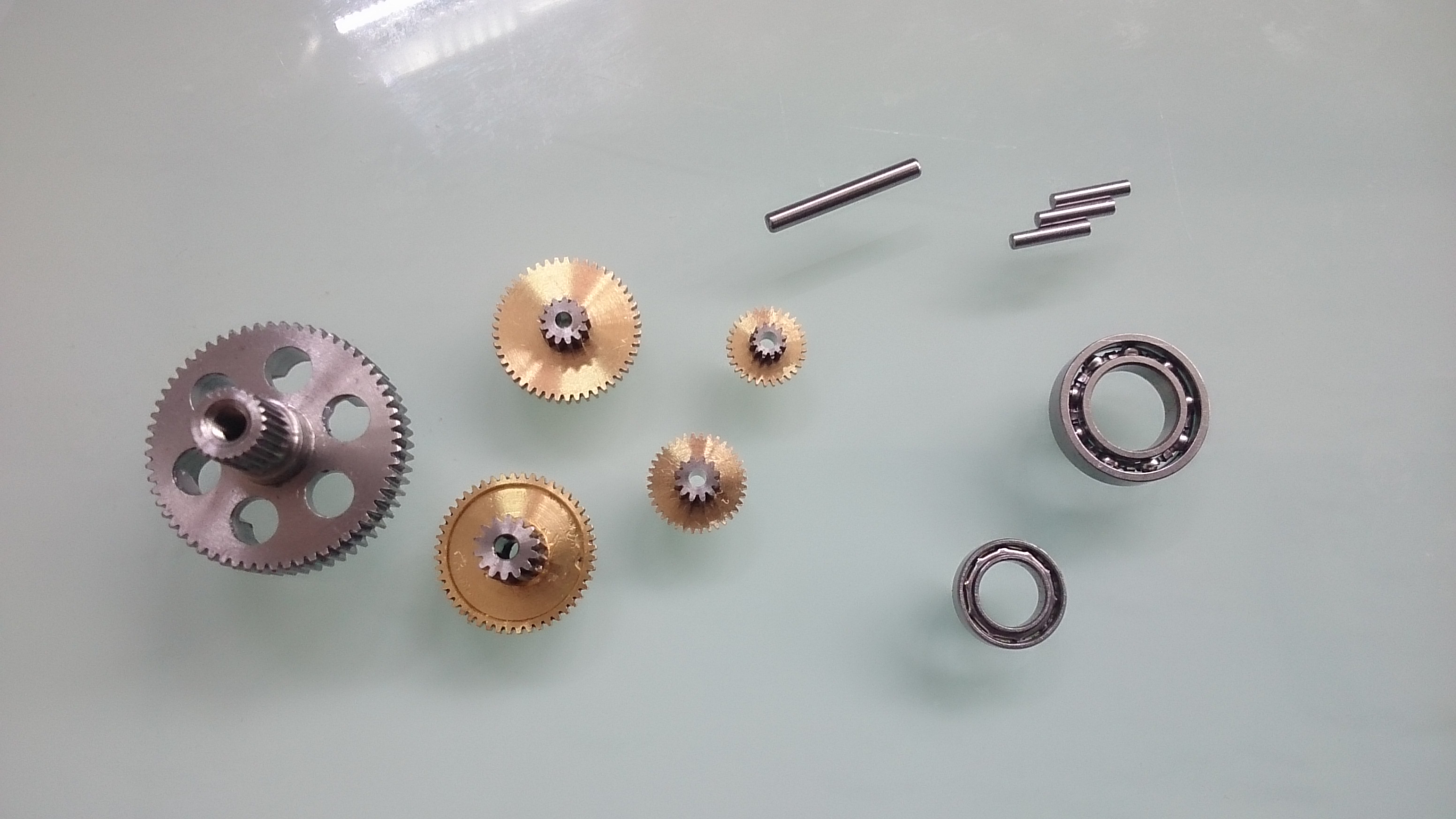
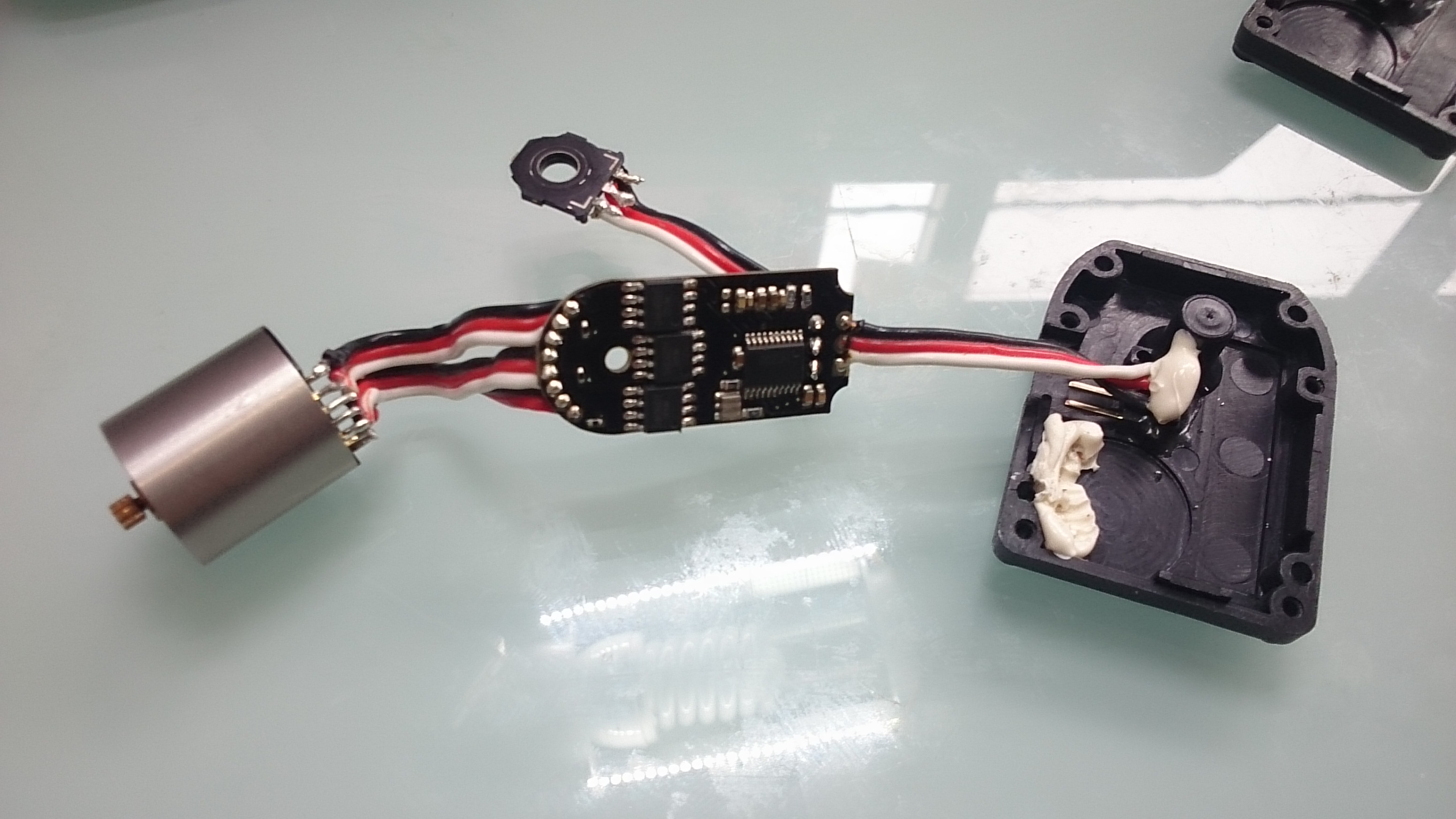
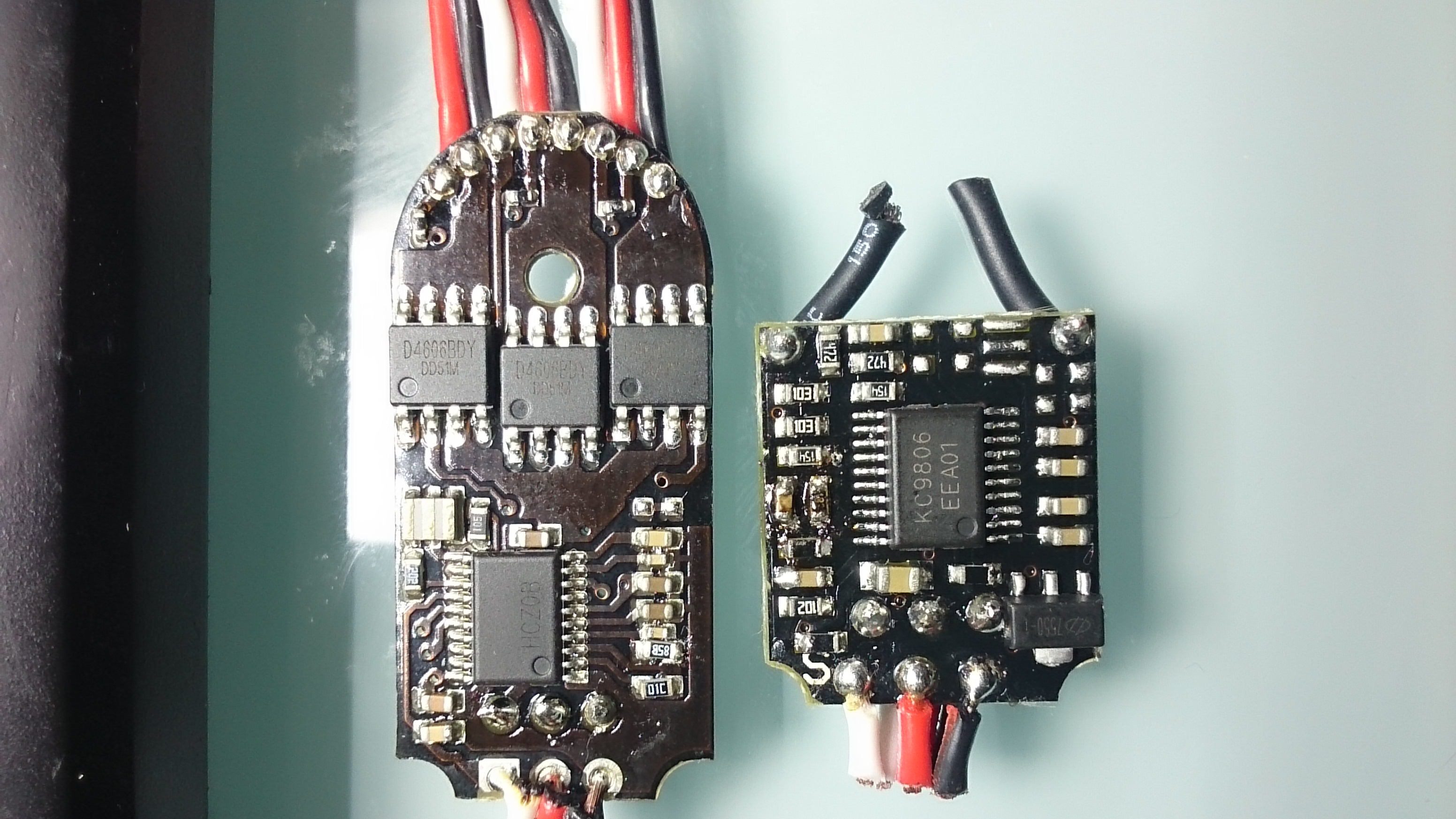
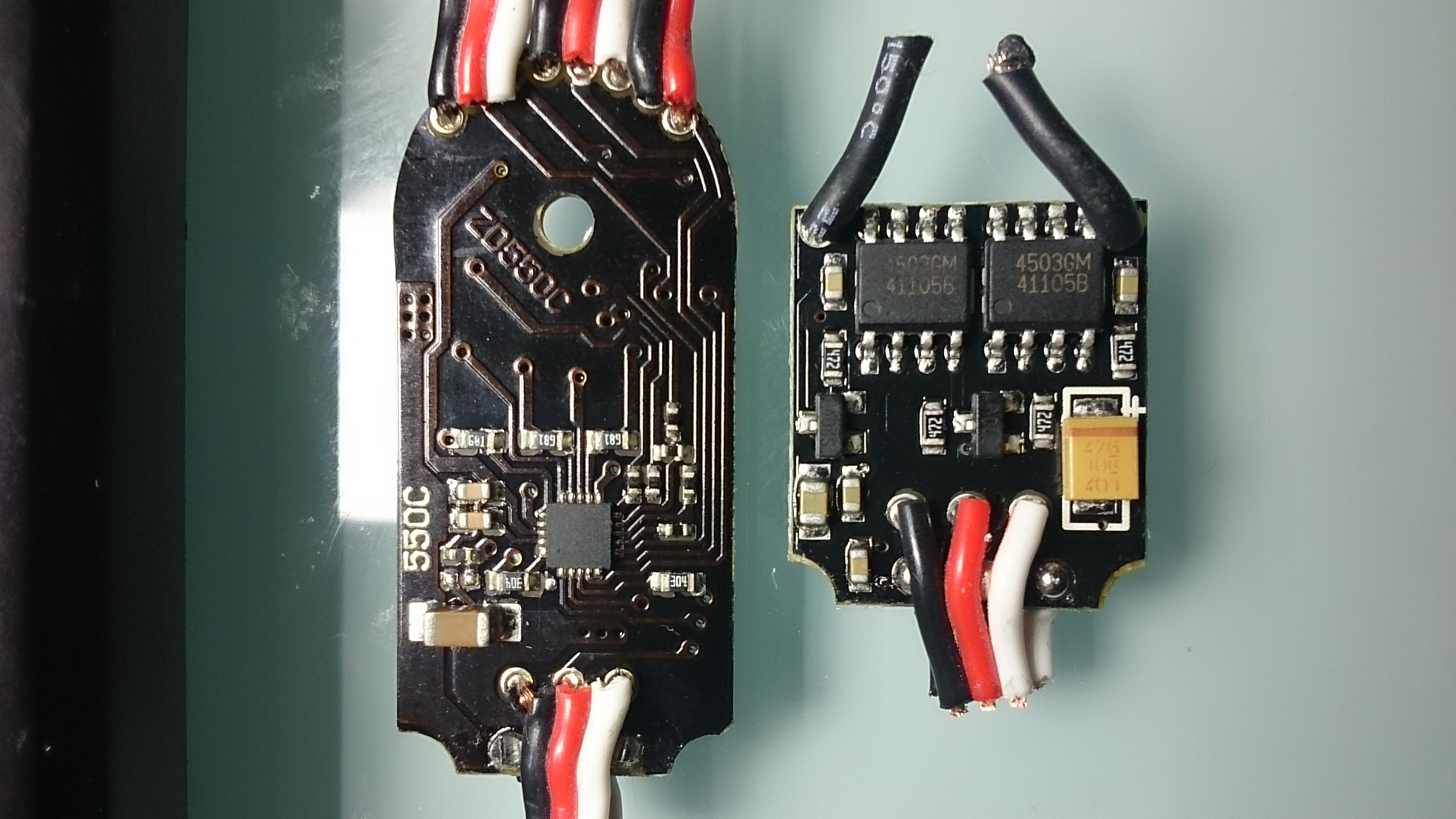
some images inside the servo
can be buyer from
https://www.amazon.es/ABRS-5314HTG-Full-HV-Advance-Brushless/dp/B00JWR5ZTS/ref=sr_1_4?s=toys&ie=UTF8&qid=1471515421&sr=1-4
home products site
http://alturn-usa.com/index-e.htm
regards
nicolas
Statistics: Posted by nicolas gomez — Thu Aug 18, 2016 12:11 pm
]]>