Full robot body

All parts

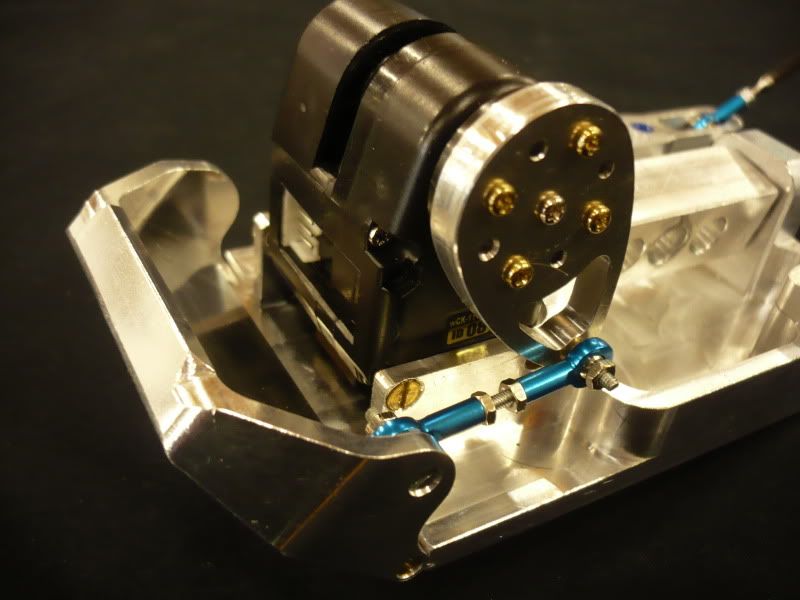
Ankle

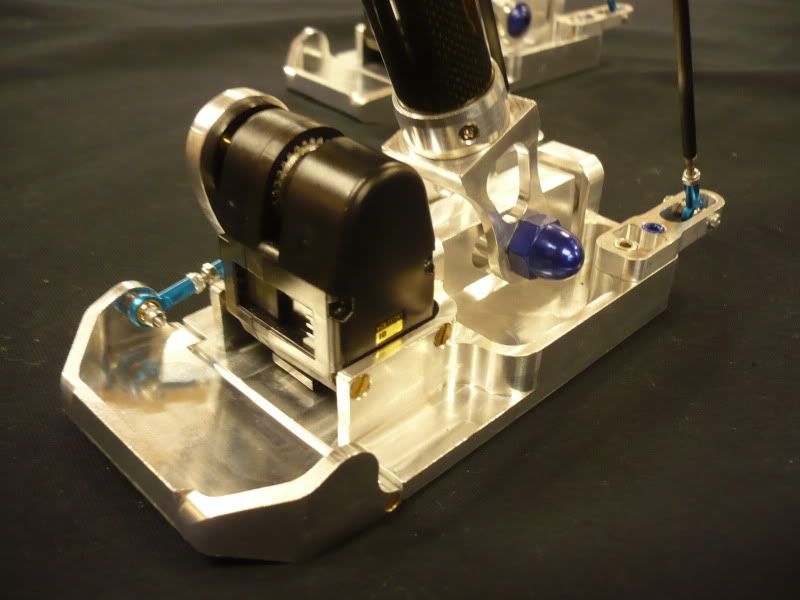
Foot & Toe
Full Leg



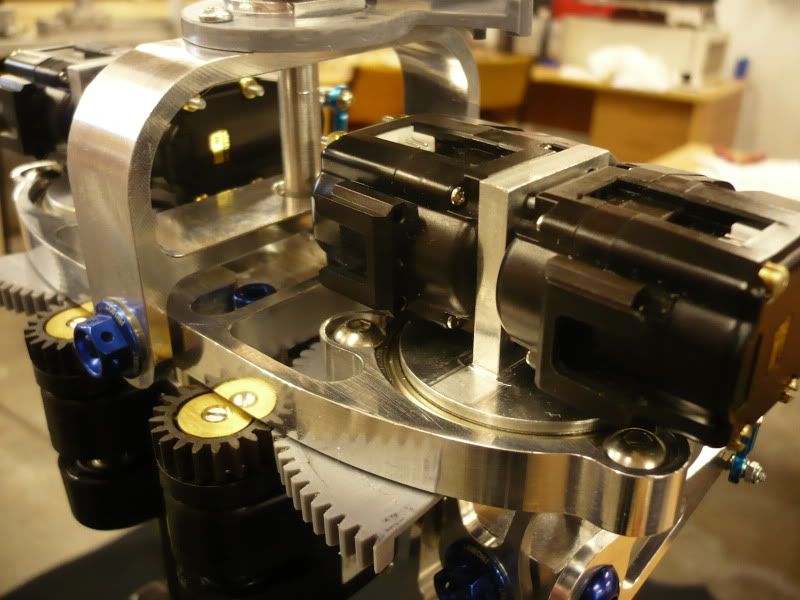
Pelvis & Hips


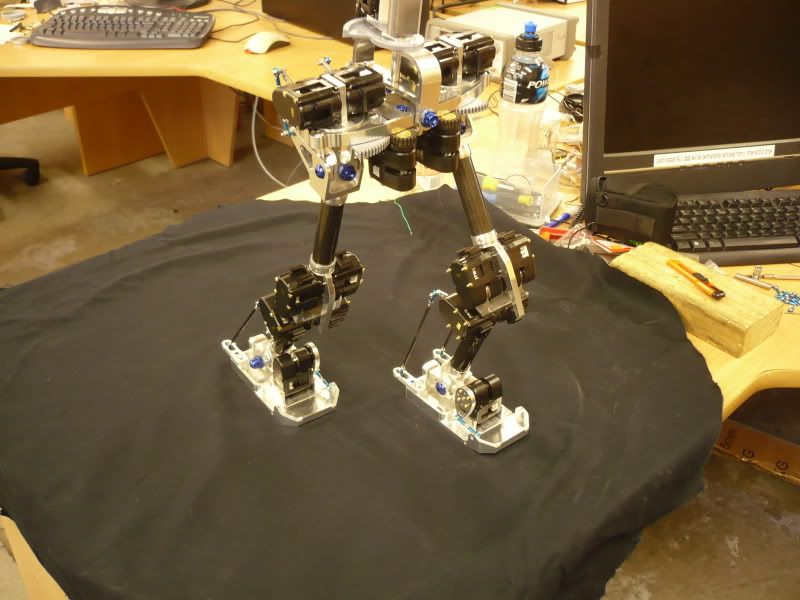
Full lower body

Here the description and documentation
http://mro.massey.ac.nz/handle/10179/2904?show=full
here the pdf
http://mro.massey.ac.nz/bitstream/handle/10179/2904/02_whole.pdf?sequence=1
regards
nicolas
Statistics: Posted by nicolas gomez — Wed Jun 18, 2014 12:44 pm
]]>