Thank you for sharing that with us.
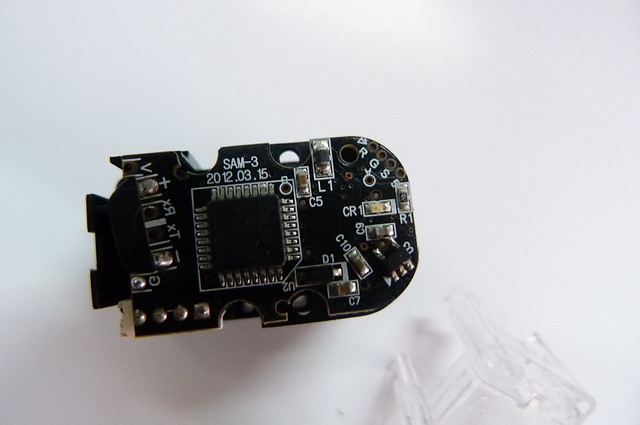
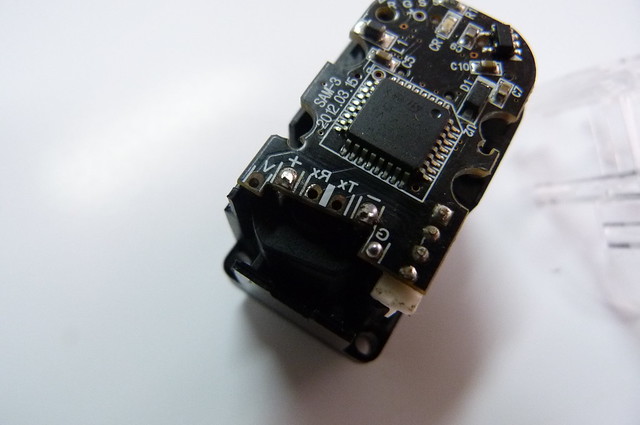
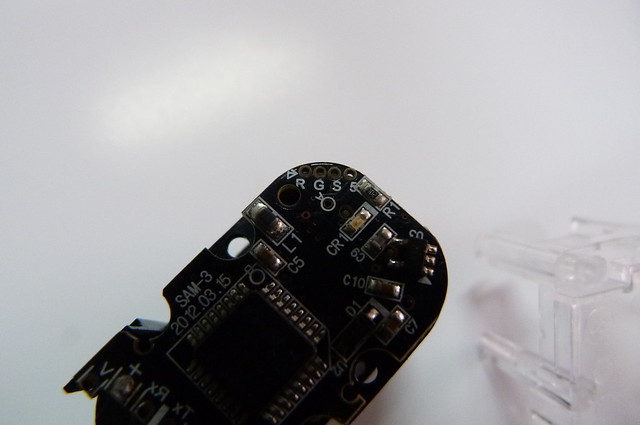
I'm still quite curious as to what the "R","G","S" and "5"(?) pins are for.
Anyway I wanted to point out something I believe I missed in my initial port:
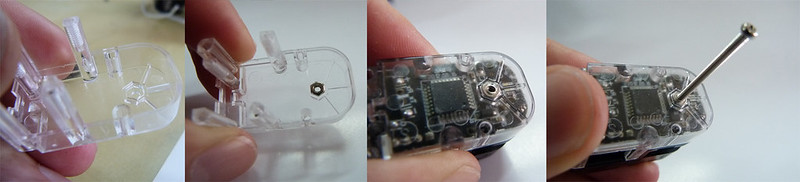
the SAM-3 servos come with a Horn that's compatible both with the Rivet system and also with the use of Screws.
Bellow is a picture of the kit contents:

You'll notice the Horn has 4 large holes for rivets and 4 smaller ones where you can fit a nut and use a screw to attach them to other frame systems.
This, combined with the possibility of adding a backhorn (shown in the first post) makes these servos very flexible in terms of use within the Robobuilder system and also outside the Robobuilder ecosystem.
A 4 pin molex to 4 pin molex cable is also included with the servos (this is the same cable that comes in 57xx robots as the connectors are exactly the same).
Regards
Pedro.
Statistics: Posted by PedroR — Wed Mar 06, 2013 4:26 pm
]]>