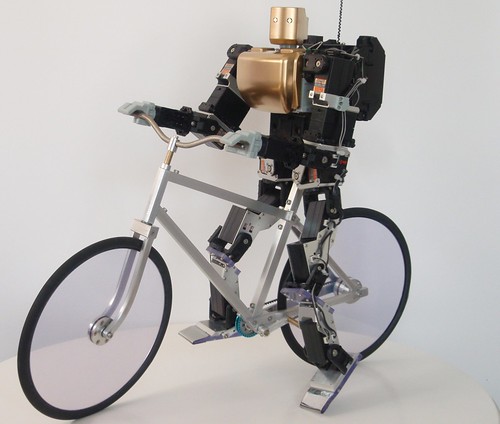
primer_v2 by RoboSavvy, on Flickr
The robot pedals with his feet at variable speed. The steering is done by the robot hands as with a normal bike, and remote controled by a human.
Stability is acheived by relying on the inertial centrifugal effect of the front wheel and on a gyro aided by a PID controller that takes over streering when driving in a straigh line. Seems like when the robot steers his arms he also bends the waist leaning a bit into the turn. Breaking is acheived by taking the feet off the pedals and pointing them down to the ground using the metal feet as friction breaks.
He is able to walk backwards and forwards while in break mode with feet pointing to the ground and he gets back into pedaling by lifting one foot onto a pedal then the other, starting to pedal and then the PID controller kicks in. Seems like there is human intervention when going from breaking position to lifting the first foot involving setting the pedal at the lowest position.
A small (6 deg) angle lags between the leading foot and the other so that the leading foot is pushing down since the foot moving up is not pulling the pedal. This prevents from the foot coming up from interfering the the downwards torque action of the other foot.
Check the video
phpBB [media]
Statistics: Posted by nunogato — Fri Oct 21, 2011 6:48 pm
]]>