You write that first of all we need to save status to ram - this is not true, by executing 13 00 02 00 00 00 [b]21 87 fd 03 00 00 00 00 00 00 00 00 bd[/b]
you write to ram literal data 21 87 fd 03 00 00 00 00 00 00 00 00 from the start address 00 00 00 .
This data are - 21 87 - value in SystemRegister and it means that [2x10000110000111] from left to right
bit 0 - true means enable ICS Servos(could operate)
bit 1 - true means enable execution programm from ROM
bit 2 - means status of interpolation operation
bit 3 - true means enable vector jumping
bit 4,5 - means ICS frame size (00 - 10ms 01 - 15ms 10 - 20ms 11-25ms )
bit 6,7 - means COM baudrate (00,11 - 115.2kbps 01 -625kbps 10 - 1.25Mbps)
bit 8 - Zero flag
bit 9 -Carry flag
bit 10 - Error flag
bit 11,12 - not used
bit 13,14- means ICS baudrate(00,11 - 115.2kbps 01 -625kbps 10 - 1.25Mbps)
bit 15 - green LED activation
FD 03 00 - address 00 03 FD writes into Program counter (this is main program loop address at ROM according documentation, but in my case it's 00 04 4B, in case of Ghettokon too.)
That's why, if user has different baudrates for ICS or COM, or different frame size it will not work correctly.
Now, i will describe this
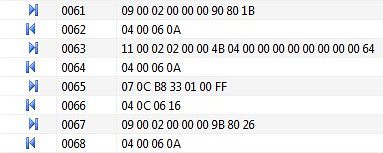
first command put robot in wait status(writes value 9080 to system register)
second command put address of wait loop 00044B to command counter and writes 0 to other counters and flags
third command calls motion from address 0133B8 (writes this value to command counter)
forth command switch robot to execution mode(writes 9B 80 to system register) and after this robot start playing motion.
In PedroR manual first and second commands collaborates into one command.
Statistics: Posted by EngineerD — Tue May 22, 2012 5:13 pm
]]>