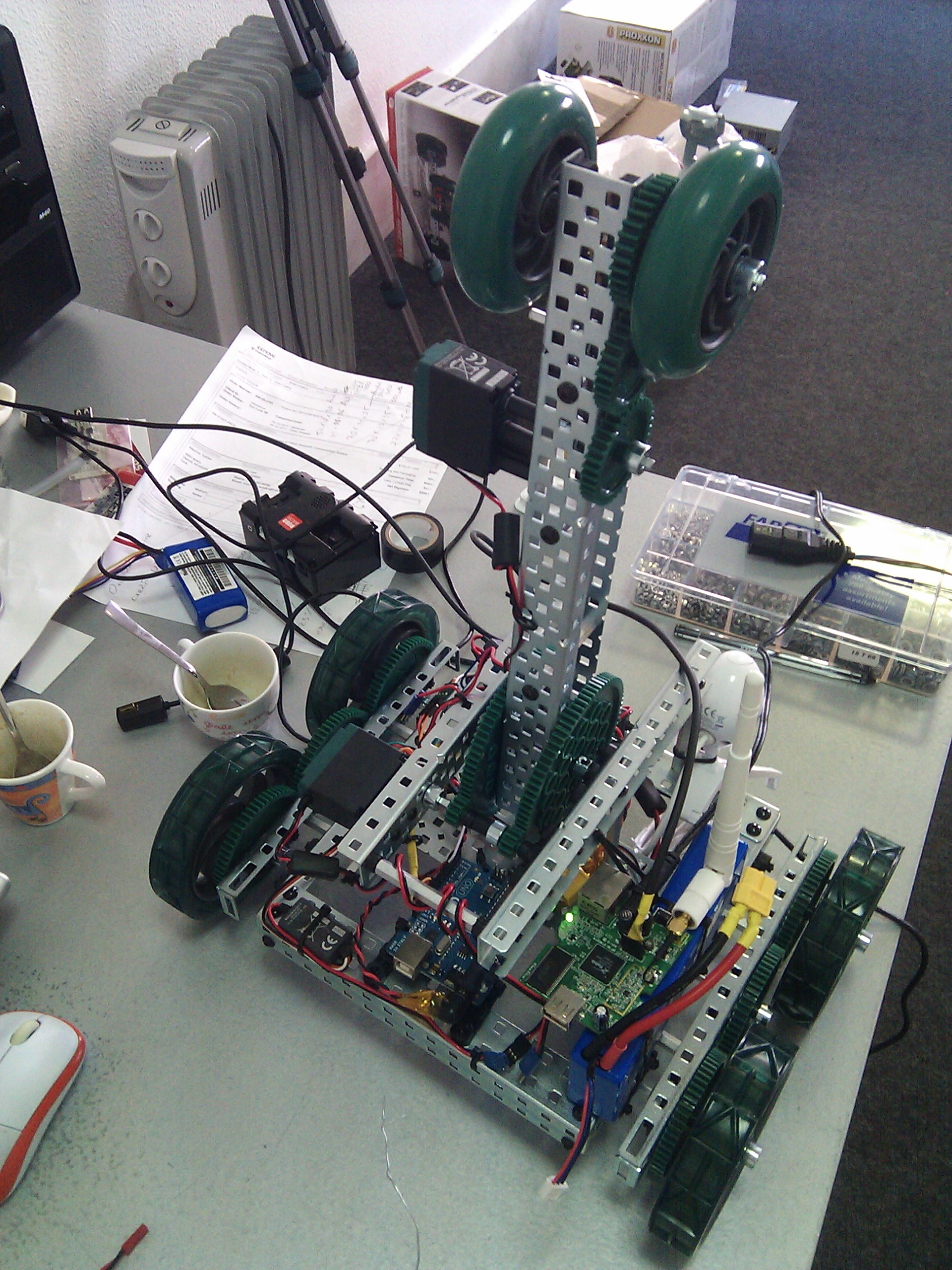
I't now fully assembled so it is built from:
1 x VEX Protobot Robot Kit
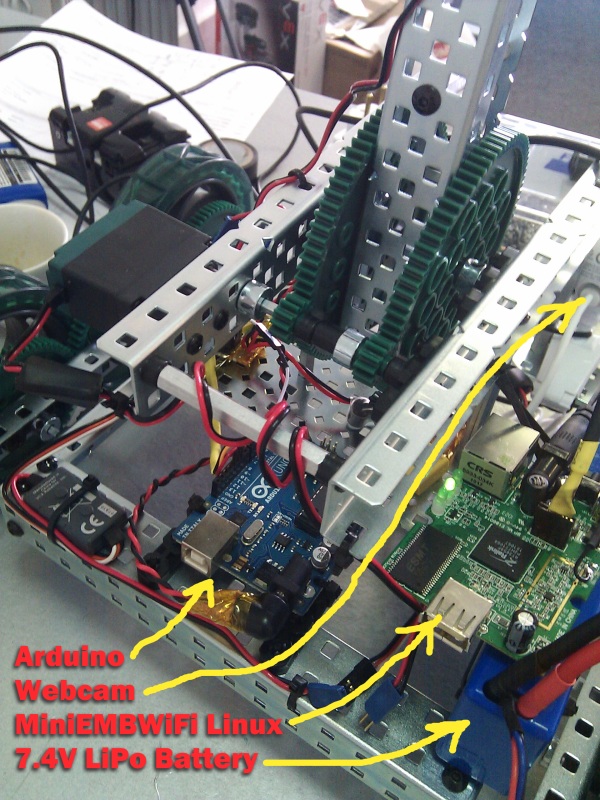
1 x Arduino Uno
1 x Omnima - MiniEMBWiFi 320MHz Embedded Linux Board
1 x ZIPPY Flightmax LiPo 2S 7.2V 5000mAh 20C (maybe this is too big but it the one we had in the office)
1 x USB Cable A to B - 6 Foot To connect the Arduino to the Linux (didn't had a smaller one)
1 x UBEC Voltage Regulator 5V 3A (to power the Linux board and the USB hub)
1 x UVC USB Camera
1 x 4 Port USB Hub
Then we made on the MakerBot the supports for the Arduino and the Linux Board and with some pin headers a small board where the motors are connected, so they are powered directly from the LiPo but the signal comes from the PWM ports of the Arduino.
Next task: Make it work
Check some pictures
<object width="600" height="450"> <param name="flashvars" value="offsite=true&lang=en-us&page_show_url=%2Fphotos%2Frobosavvy%2Fsets%2F72157627514749800%2Fshow%2F&page_show_back_url=%2Fphotos%2Frobosavvy%2Fsets%2F72157627514749800%2F&set_id=72157627514749800&jump_to="></param> <param name="movie" value="http://www.flickr.com/apps/slideshow/show.swf?v=104087"></param> <param name="allowFullScreen" value="true"></param><embed type="application/x-shockwave-flash" src="http://www.flickr.com/apps/slideshow/show.swf?v=104087" allowFullScreen="true" flashvars="offsite=true&lang=en-us&page_show_url=%2Fphotos%2Frobosavvy%2Fsets%2F72157627514749800%2Fshow%2F&page_show_back_url=%2Fphotos%2Frobosavvy%2Fsets%2F72157627514749800%2F&set_id=72157627514749800&jump_to=" width="600" height="450"></embed></object>
Statistics: Posted by nunogato — Thu Aug 25, 2011 12:07 pm
]]>