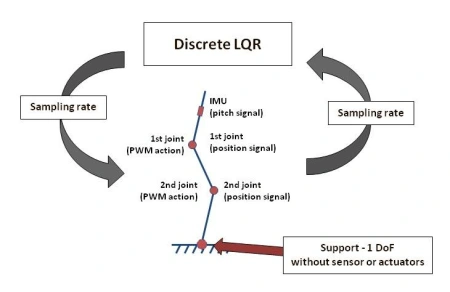
Anyone interested in a rigorous approach to understanding every aspect of the behavior of the robot and being able to control it using optimal/robust controler such as DLQR should check out recent developments at http://actuated.wordpress.com
Statistics: Posted by limor — Thu Apr 21, 2011 12:25 am
]]>