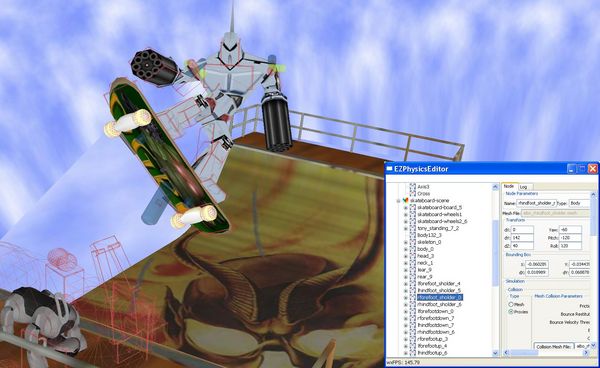
EZPhysics lets you interactively embed objects supported by the physics engine into 3D meshes, attach joints and constraints to the physics objects, save the “physically rigged” scenes into files, and run simulations or embed the physically rigged scene into your projects.
Statistics: Posted by exe_cutable — Tue Sep 27, 2011 3:32 pm
]]>