If the voltage at the servo stays constant under load and the efficiency of the servos is constant across multiple servos, this will work great.
Statistics: Posted by PaulL — Tue Jan 01, 2013 2:43 pm
]]>
Statistics: Posted by TiagoM — Tue Jan 08, 2013 12:18 pm
Statistics: Posted by MarcoP — Wed Jan 02, 2013 6:12 pm
Statistics: Posted by PaulL — Tue Jan 01, 2013 2:43 pm
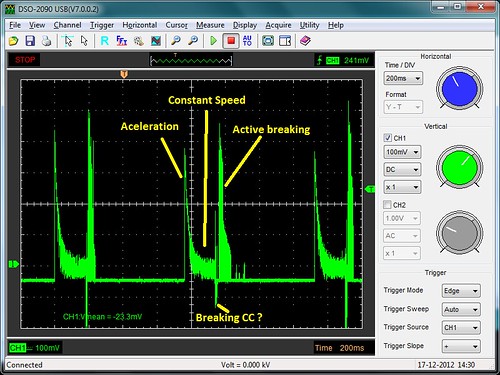
Statistics: Posted by MarcoP — Mon Dec 17, 2012 6:42 pm