We are using this FSR to measure pressure in the finger tips.
More info on that at http://robosavvy.com/forum/viewtopic.php?p=36994#36994
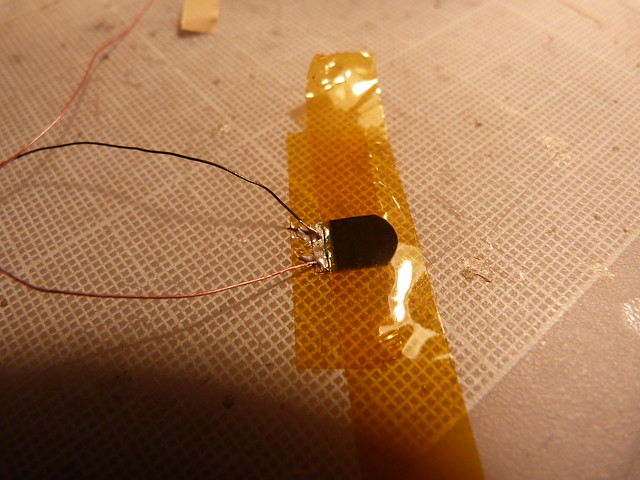
The sensors have to be modified to make them smaller to fit inside the finger tip. After understanding exactly how it works and and doing some tests we manage to cut it down to size, and glue some wires using conductive epoxy.
Them they were glued on the tip of a finger.
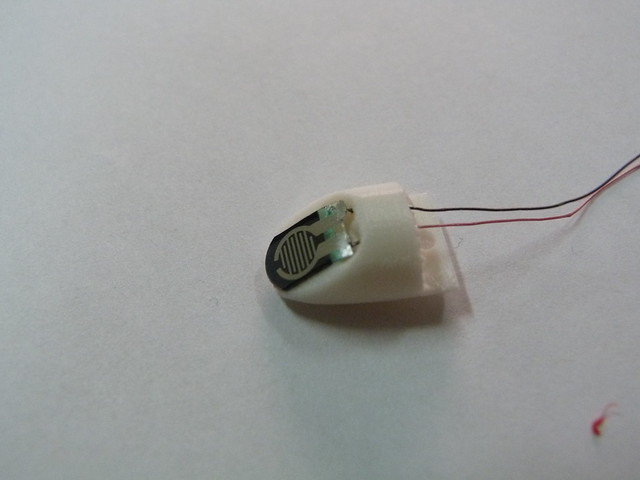
Next step is to add some of silicone to the tip to protect the sensor and increase grip.
Rgds
Statistics: Posted by MarcoP — Fri Feb 22, 2013 7:03 pm
]]>