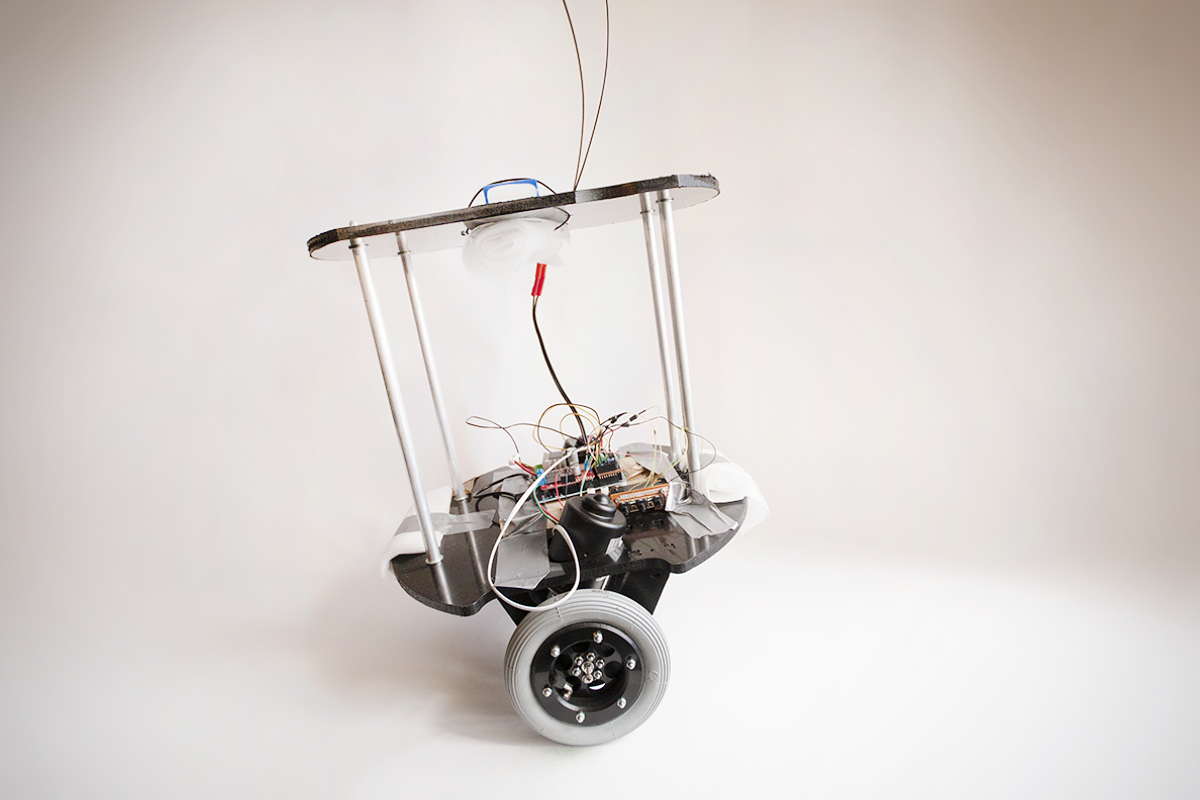
This robot is intended for advanced applications, such as telepresence, domotics or autonomous tracking of humans, to act as a robotic camera man. The use of a self balancing platform facilitates going over small obstacles such as carpets and changes in pavement, as only the drive wheels touch the floor. This also enables off-road use up to a point.
The addition of retractable landing gears will enable the robot to self park in upright position and power down, and then restart balancing autonomously.
phpBB [media]
We are now in a test period, tuning the controller parameters to achieve a stable balance as much as possible. This will allow us to conclude if the top speed of the motors is high enough to make the robot recover from aggressive angles and if the encoders have enough resolution to achieve fine speed control at low speeds.
We're all very proud, of both Claudio and the UFO Bot.

Statistics: Posted by robosavvynews — Fri Aug 09, 2013 5:58 pm
]]>