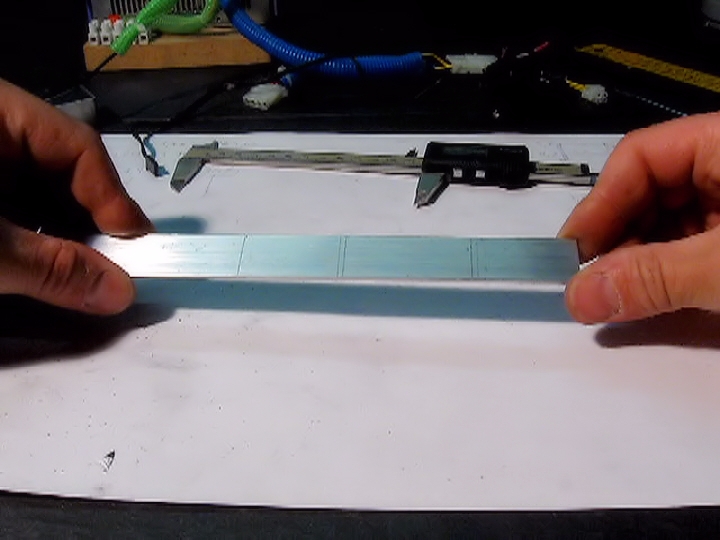
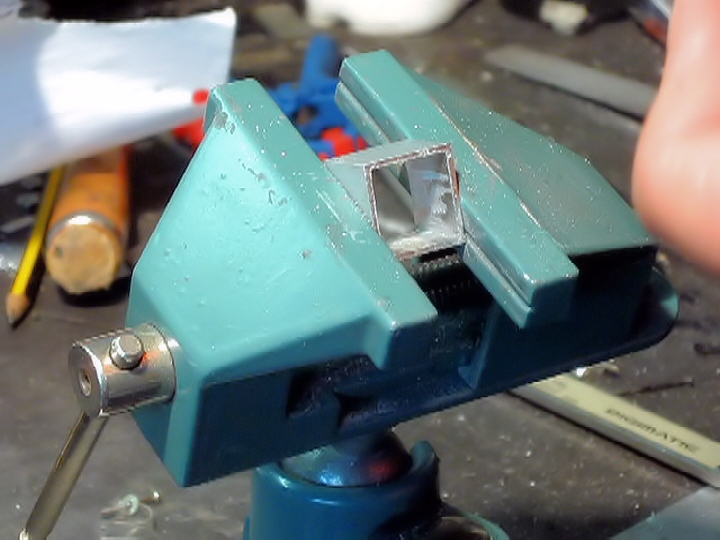
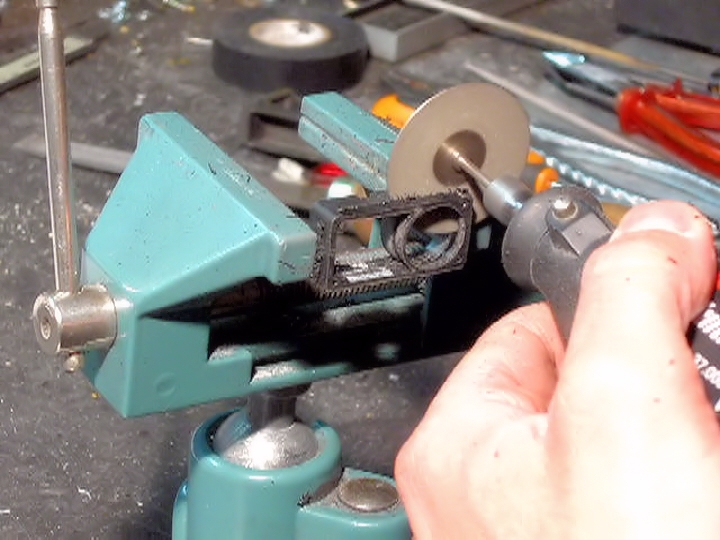
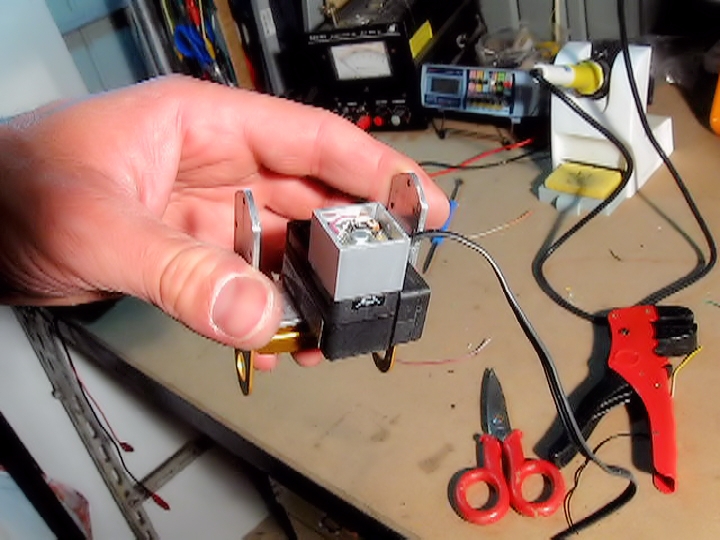
......... formed by a square tube, with a side equal to the diameter of the motor.
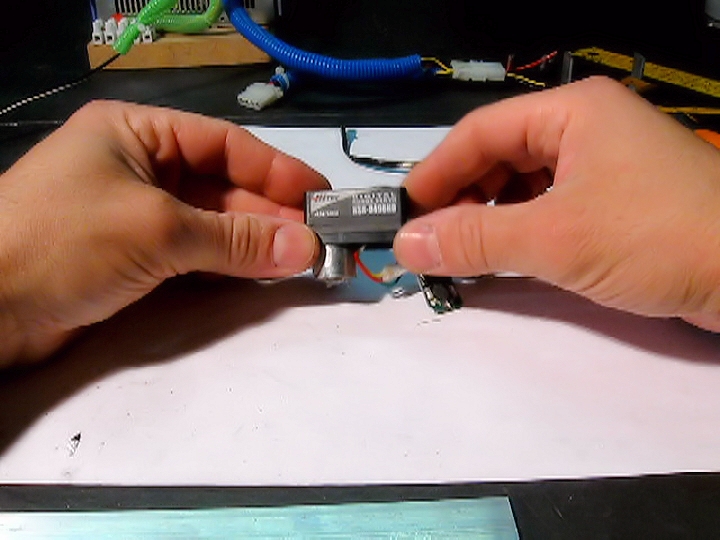
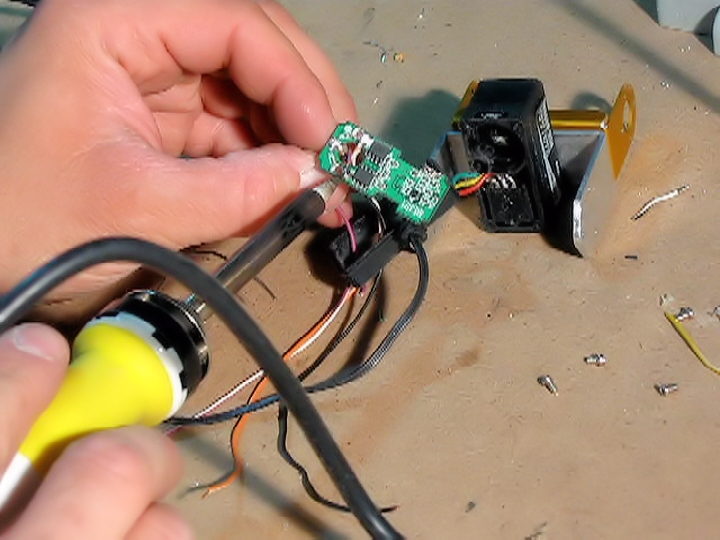
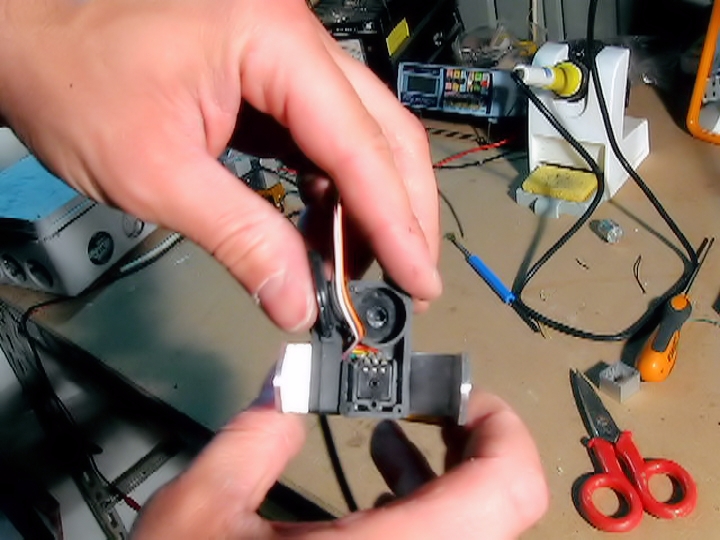
.....remount the electronics .... and I turn the cables to an alternate location:
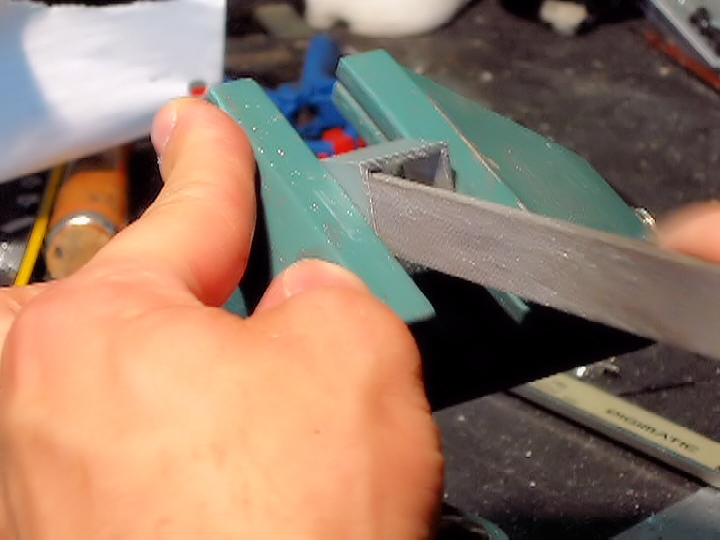
.....another small reduction
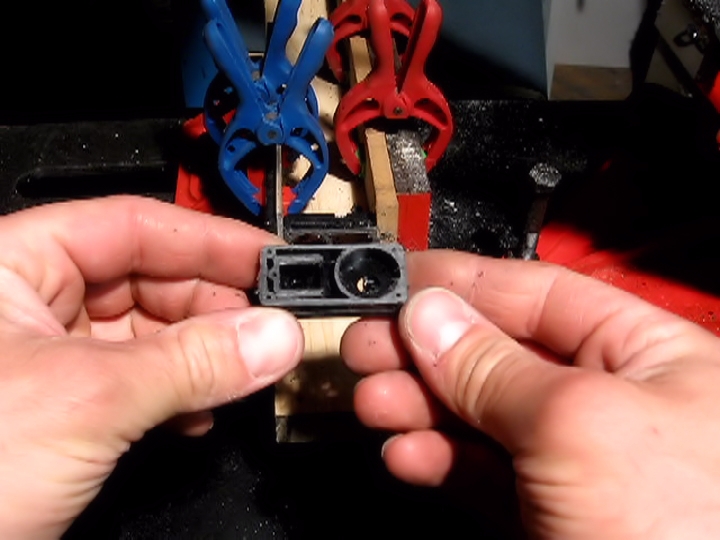
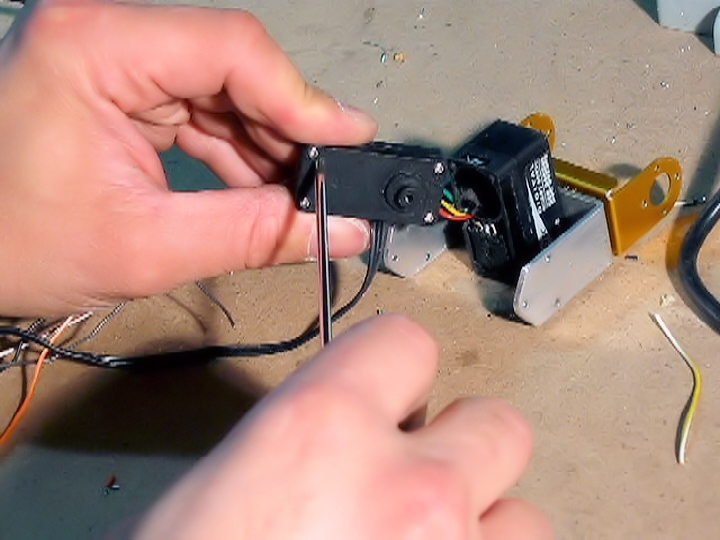
I go prolong contact between electronics and motor, in order to remove the circuitry from the motor itself.
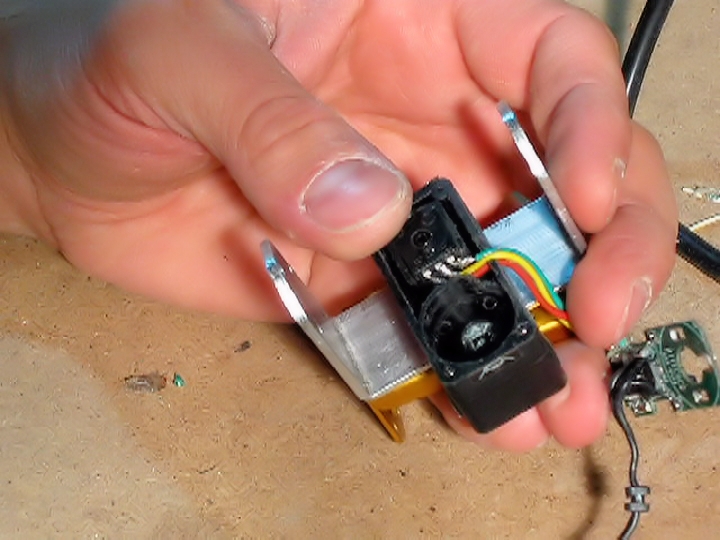
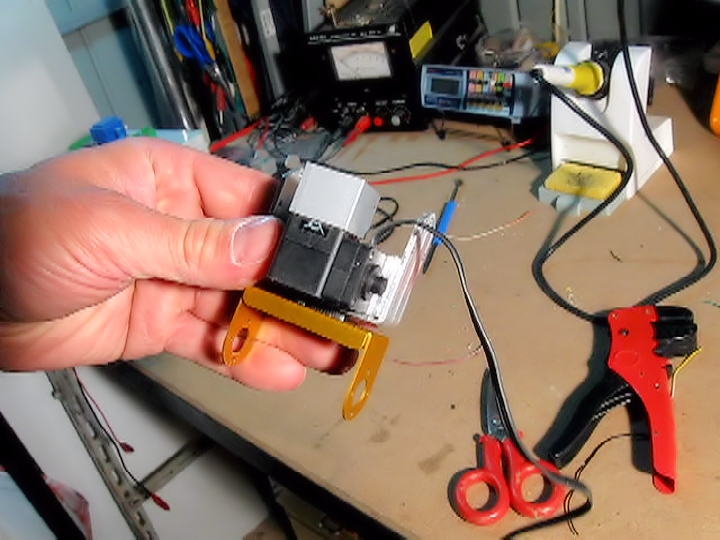
electronics will be inserted into its original slot.
and .... staying in a slot formed by the bracket:
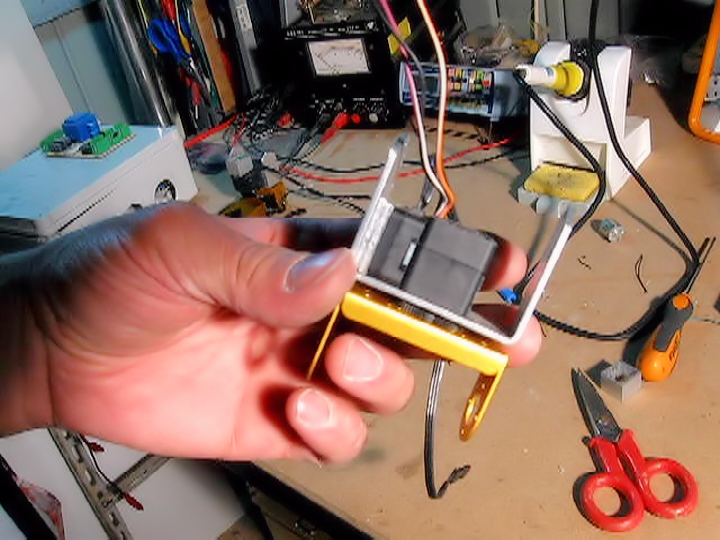
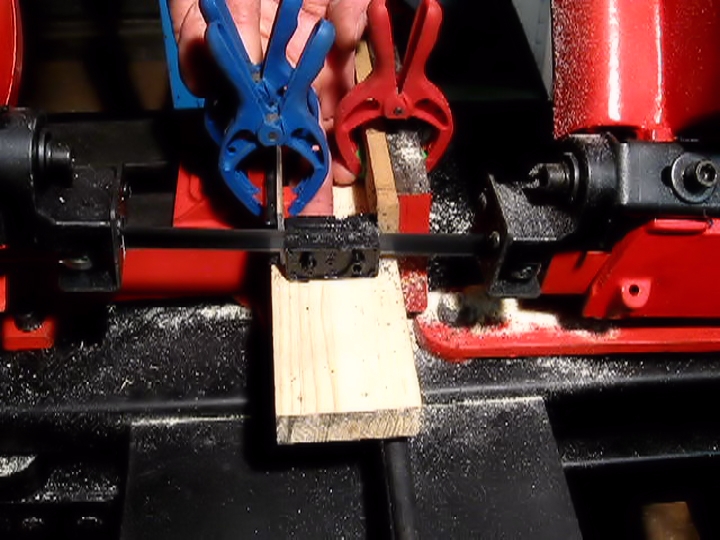
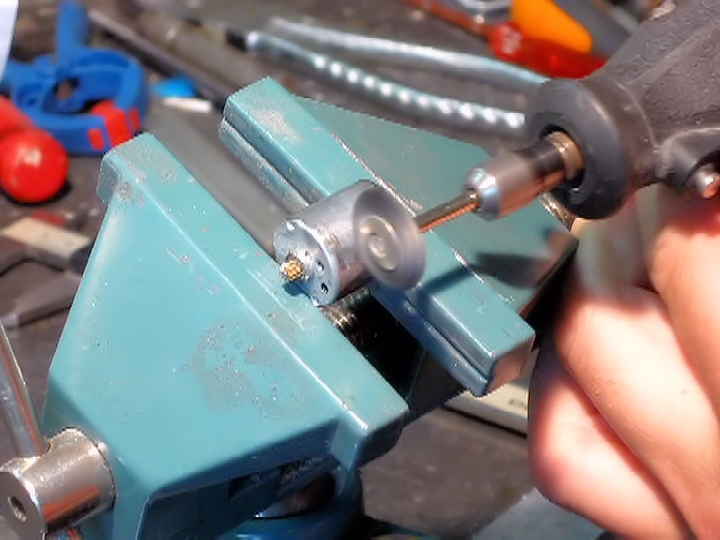
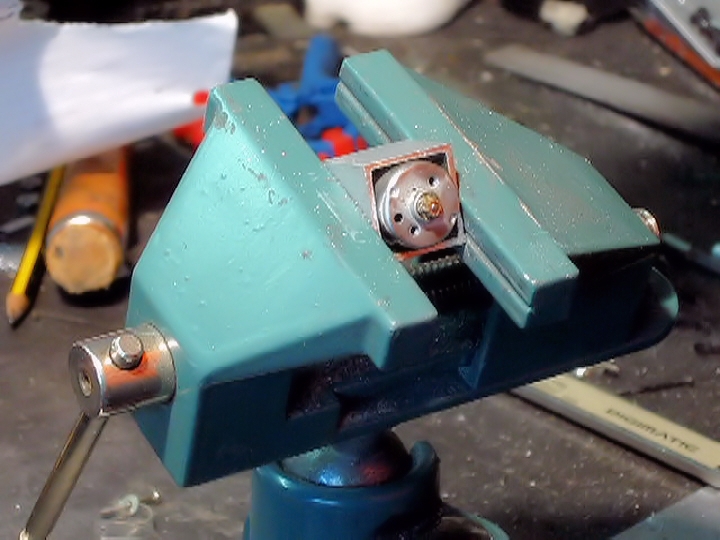
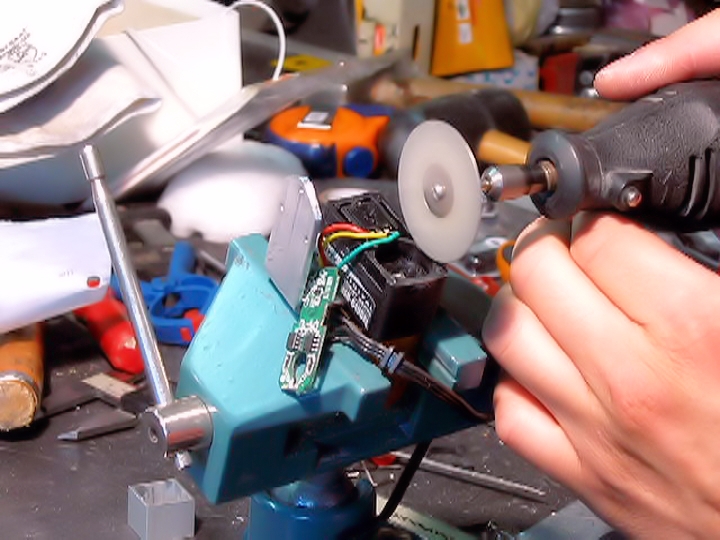
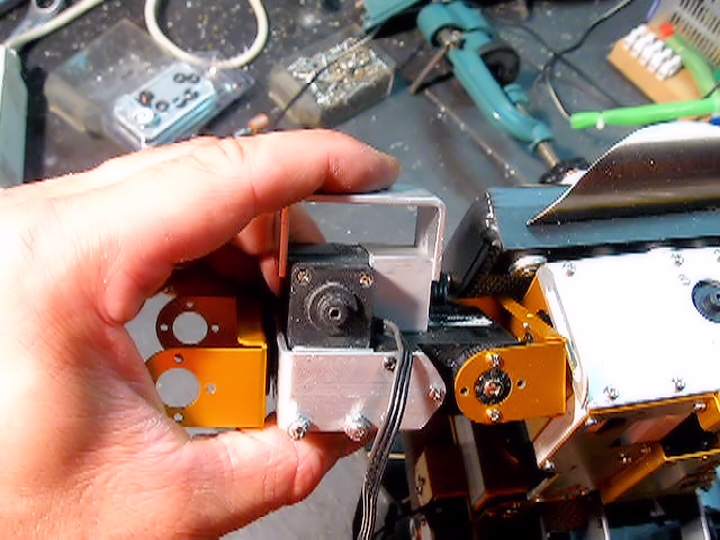
it's time to insert the motor with the new housing:

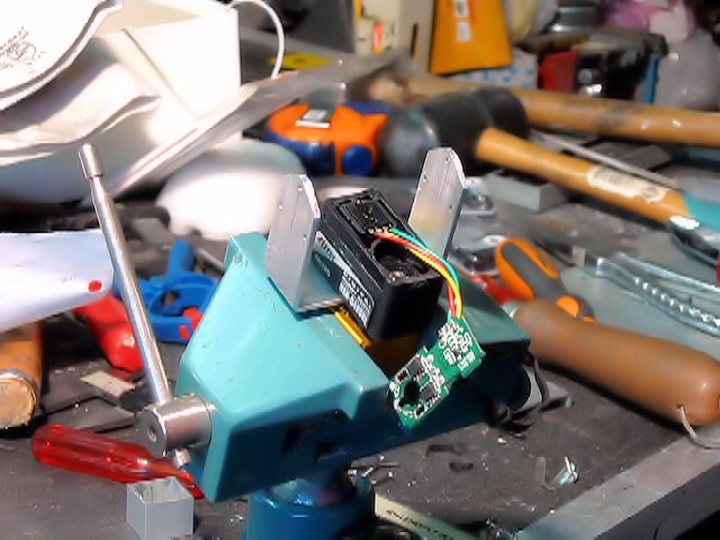
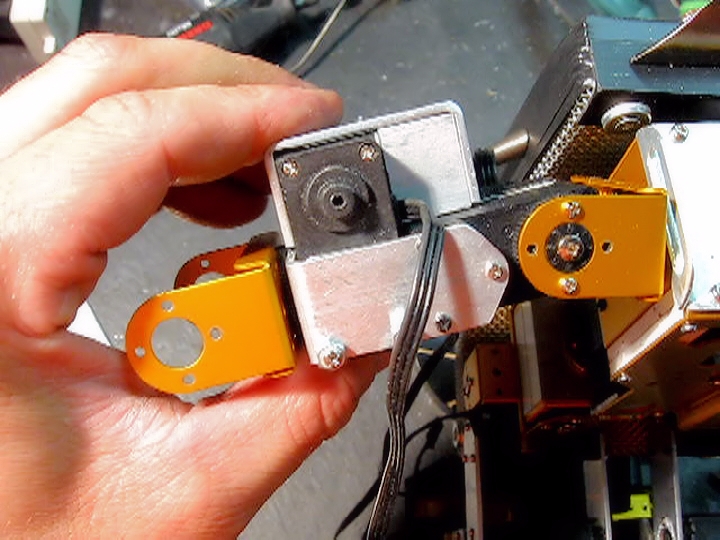
a C bracket will be used to secure the two parts together:
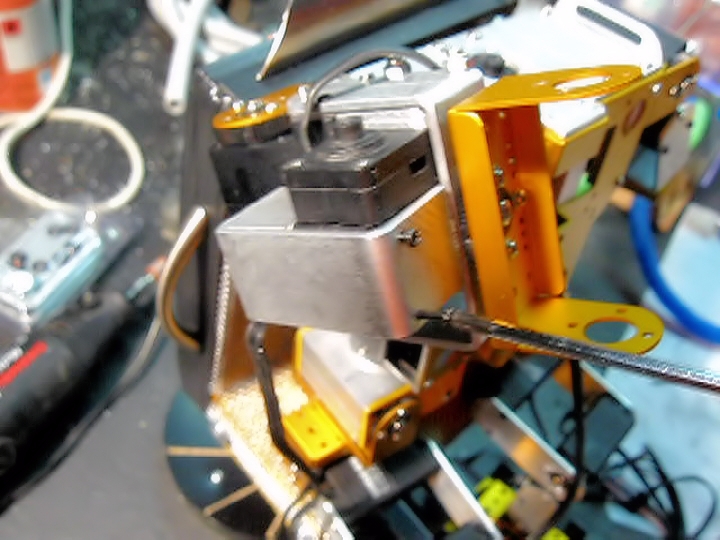

End of the experiment.
thanxs for watching
saluti
landyandy
Statistics: Posted by Landy — Sun Aug 31, 2014 8:19 pm
]]>