Gman wrote:Hello everyone
I added a 2-axis accelerometer to my robonova to enable the robot_tilt: routine.
this is the accelerometer
http://www.dimensionengineering.com/DE-ACCM2G.htmI soldered an old cd audio cable to a 14 pin ic socket
made sure the wires were going to the proper pins
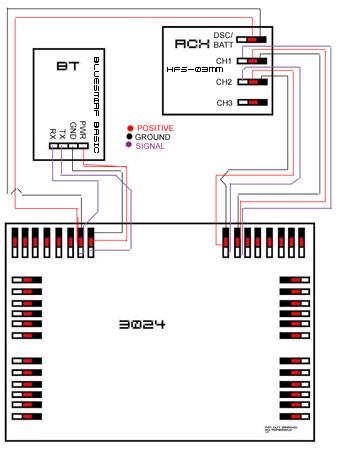
(ground at the outer edge, signal at the inward pin and +voltage in the middle)
I am only using the x axis right now. y axis output is not connected on my robot.
here is the diagram showing X AND Y axis connected and ready to use
http://robosavvy.com/Builders/Gman/dime ... ometer.jpgI put the accelerometer into the socket and it fits nicely inside the head behind the LED.
It's held in place with some double sided foam tape
Here is a picture of the results
http://robosavvy.com/Builders/Gman/acce ... 0setup.jpgThis sensor is very sensitive and I had to change the robot_tilt: values
I messed around until finding that this works for me
IF A <95> 160 THEN GOTO tilt_high

{kind=link}
{kind=link}