Here are couple of examples:
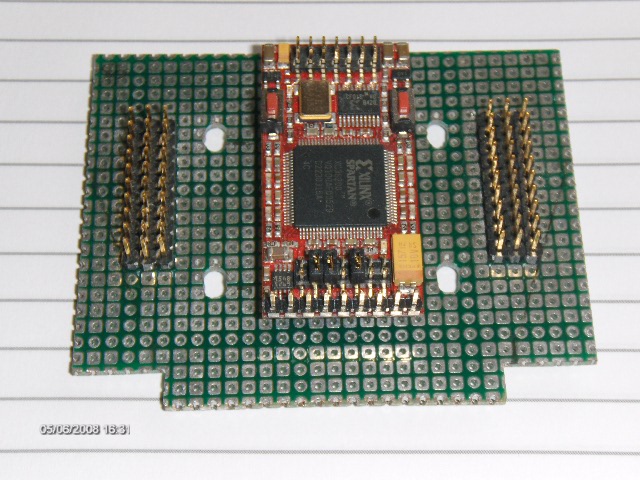
This is a Xilinx Spartan controller with 20 uarts or 20 PWM and 2 picoblaze processors. The board is bigger than standard, but the back still just fits.
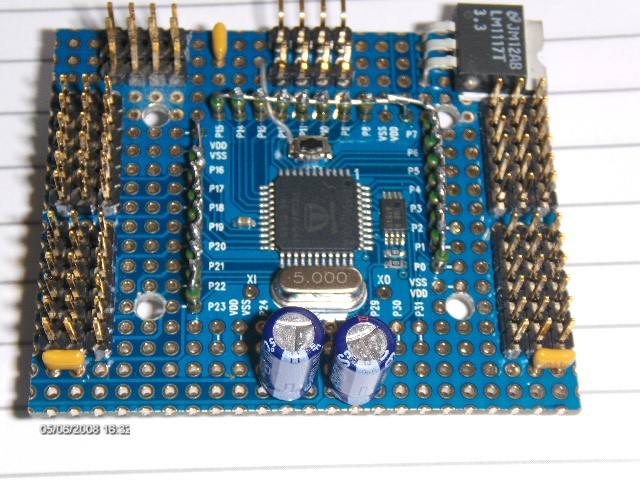
This a Parallax Propeller controller. either 24 UARTS or 24 PWM, 2 high speed serial and 2 I2C ports. based on parallax protoboard.
So what am I using now, well actually back with the C3024, based on what I learnt, I have a new firmware which meets my needs without a controller swap. The controller is fine for the servos. I have a high speed interrupt driven serial port, so it works as a slave to another processor or PC.
Statistics: Posted by i-Bot — Thu Jun 05, 2008 6:05 pm
]]>
