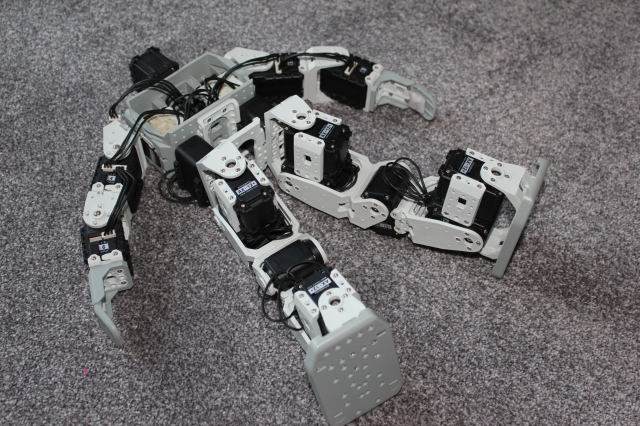
Although I don't have any specific goals at the moment, the general idea is to build an autonomous Bioloid with some good walking gaits working in parallel with some add-on sensors, as my Bioloid is build from the discontinued Comprehensive kit which had very little in terms of sensors.
In terms of additional hardware, I have currently chosen:
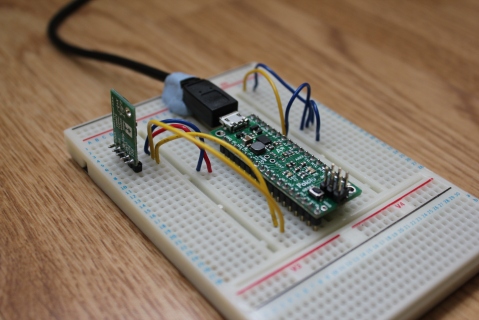
- Arduino-style mini board for sensor data collection
- USB2AX for control via main controller (currently laptop)
- Raspberry Pi 2 as future main controller, once the BIoloid goes autonomous
- IMU for orientation/balance
- Force-sensing resistors in feet
- Large LiPo battery powering everything (bought a 5500mAh monster, which is a bit on the heavy side!)
Some current software I have chosen:
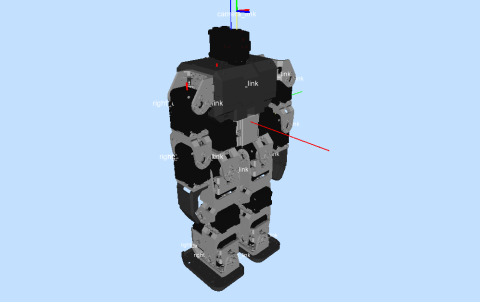
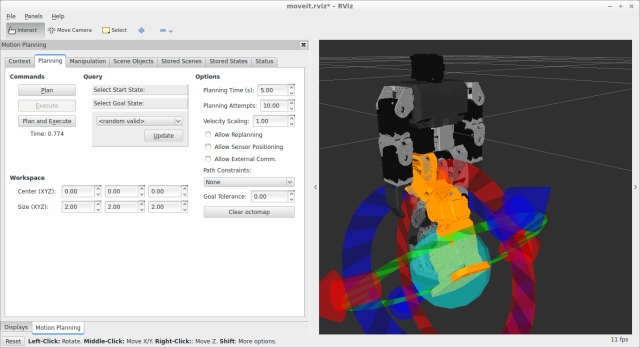
- Linux and ROS as the core platform, hence many of the ROS tools such as RViz, tf, robot state publisher etc.
- MoveIt! for advanced motion
- C++ using Qt IDE for the custom ROS nodes
- Arduino IDE for the Arduino board, using the rosserial library
Currently the project is in its infancy, so I've only just got the main hardware components and played around with the sensors. Most progress has been done with representing the Bioloid in ROS.
I will be documenting the progress as much as I can on my blog.
Also, naming suggestions are welcome, as I haven't given my Bioloid a name yet, and feel that this might be bad luck!
Statistics: Posted by Dimitris — Wed Apr 08, 2015 9:56 pm
]]>