I have been sawing and drilling away at my Bioloid Humanoid for a while and now I have something slightly different... or upgraded... or something. I call him "eM-eM" which is based on "M.M." which, in turn, is short for "mishmash", because he is a mishmash of parts I had.
Here he is mostly finished for you to gaze at:

My only goal for him is to have "personality". I want him to be more reactive to the environment than the standard kit. He will make expressions on his LCD based on his sensor readings; his eyes will look in the direction of movement etc. Since the PSM lcd module is a full Propeller board, I would like to try to run the speech synthesis code found over in the Propeller forums. It may be too much though for the board to run the speech AND the graphics code at once-I know the speech system uses many of the chip's cogs. I hope to integrate a color tracking camera (perhaps the Havmio module for Bioloid?) so he can say: "I like blue." if he sees some and track colors. In the end, he will need more sensors to do all the things I want him to do and I don't even have the current power needs met! yikes.
added parts:
- foot pressure sensors by John Hyands
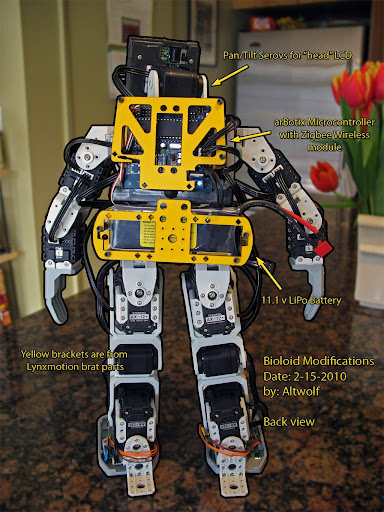
- arbotix controller with Xbee radios
- ping range sensor
- The Face is a Propeller System Module from Rayslogic.com: LCD, built-in accelerometer,sd card slot, stereo output, 8 free inputs
- 11.1 v Lipo battery
- 21 DOF - 18 standard, +1 for waist twist, +2 for head pan/tilt
- Yellow "BackPack" made from the torso section of the Lynxmotion Scout kit (erroneously listed as Brat parts in the pics).
Still to do:
- add switching regulater to power both arbotix and PSM boards.
- Forgot to re-attach the AX-s1 sensor. I think it'll attach to the top head servo (the back of the head) but point backwards from the kit direction so he can sense behind him and to the left and right. The Ping sensor sees to the front.
- I want to get a Havmio camera module so he can track/recognize color.
- add animation/interactivity to PSM LCD "face".
- figure out how to make the PSM Propeller board talk to arbotix board.
- Program the whole thing so it works! lol
Probing comments and interesting suggestions are warmly welcomed.
Statistics: Posted by altwolf — Thu Feb 18, 2010 8:14 pm
]]>