. Will try out the mirror and exchange function. Thanks UncleBob
Never thought the RX-64 is strong enough to crush a finger  . Really scary.
. Really scary.
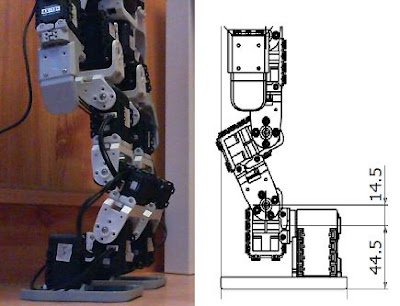
@billyzelsnack Let me try to make a stand-on-one-foot video to show how well the robot can take the load on the ankle. The problem I have is the stall torque of the AX-12+. Maybe 2-4kgf.cm more for the ankle servo would be appropriate  . If they release the AX-18F I definitely will buy 2 or 6 of them
. If they release the AX-18F I definitely will buy 2 or 6 of them 
Offtopic:
Seems like the forum has a problem with spam bots. The fellow copied my own post  Yes I mean you cpakhale
Yes I mean you cpakhale 
Minor update showing that the ankle can take some load
Statistics: Posted by 27Loco — Fri Apr 30, 2010 8:24 am
]]>