see tittle Sound Level
http://support.robotis.com/en/product/a ... _ax_s1.htm
Robot equipped with two US sensors can calculate the exact position of an object,
http://nxttime.wordpress.com/2012/11/25 ... c-sensors/
it shows how to use two distance sensors (he used the standard NXT Ultrasonic sensors) can be acceptable accuracy the location of the object. To determine the location is just the method of triangulation. As an experimental set it to the following:
http://nxttime.files.wordpress.com/2012/11/img_8697.jpg
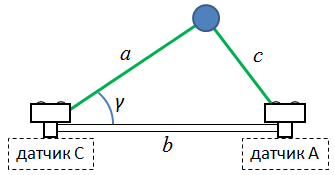
each of the sensors measuring the distance to an obstacle, should turn to an angle calculated by the formula below. As a result, the part will look like sensors always looking towards the obstacle.

This formula - a consequence of the cosine theorem http://en.wikipedia.org/wiki/Law_of_cosines , as the following illustration will help you better understand the symbols of the formula.
A similar formula can be easily obtained for the other sensor. It should be noted that the motors in a laboratory device installed so no accident - it's a little to simplify the program - in this location they will rotate the sensor exactly the value of the angle, which is determined by a formula. author also share videos that demonstrate that his approach works:
phpBB [media]
This way good works only for open space.If you have any objects like wall or another robot of soccer's team this is the reason why the system works wrong.Robot receives a lot of reflected US signals including echo.Thats why the best solution if he operates in the open space or the object should be closer to your robot against of the rest object
Statistics: Posted by Novice — Fri Jan 25, 2013 6:10 pm
]]>