Brushed DC Motor Custom Servo Installation Progress Detail

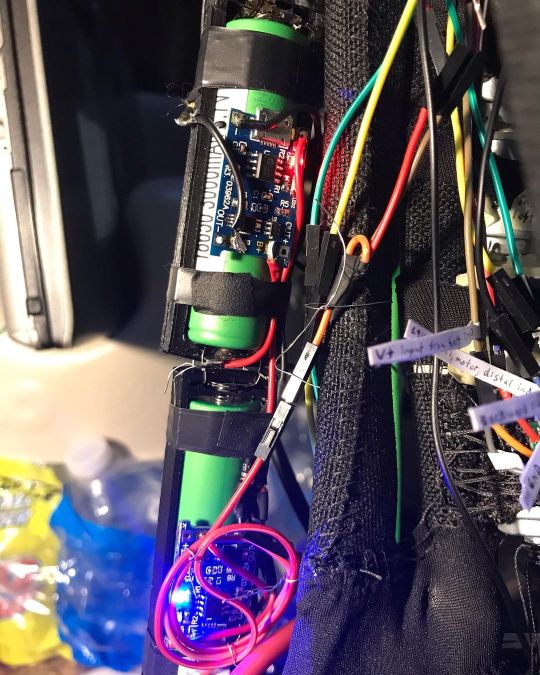
Custom 2s 18650 battery temporary setup with 3D printed battery holders and charger boards for each battery wired in and working
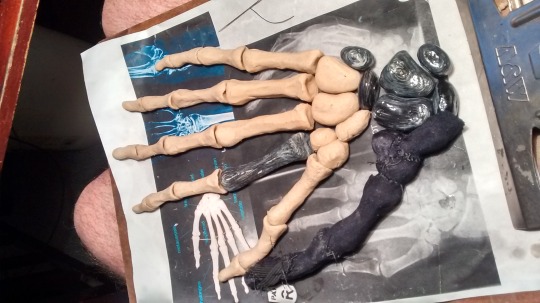
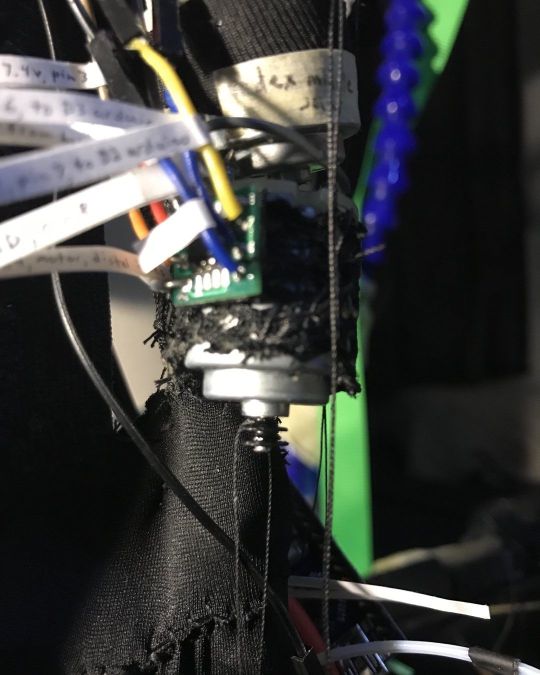
Size 140 brushed dc motor with pulley output shaft and l9110s hbridge controller wired up on sop-8 breakout board with wires tag labeled. Motor wrapped in football jersey coated in non skid rug backing and sewn onto forearm that is wrapped in 1000 denier cloth adhered with adhesive transfer tape. Football jersey offers breathability for heat dissipation. Output pulleys 3D printed in PLA and super glued onto output shaft. Muscle string is 100% nylon upholstery thread glued onto output shaft with super glue.
Rear view of battery holder setup

0.3mm id Teflon tubing attached to index finger to act as guide tube for index finger muscle string. Serves same principle function as rubber hose that guides bike brake wire.

Ceiling mounted rail setup so I can descend robot arm onto work area and adjust height and position so that both of my hands are free to do the intricate work on it.

Compact pulley system design to “downgear” brushed dc motor pulley muscle string output to lower speed and increase torque to desired levels.
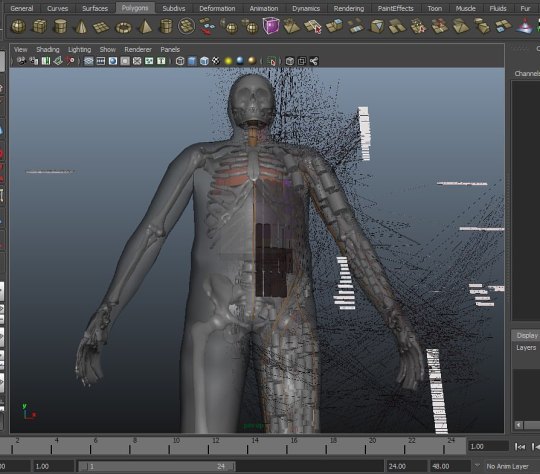
3D blueprint for robot full torso
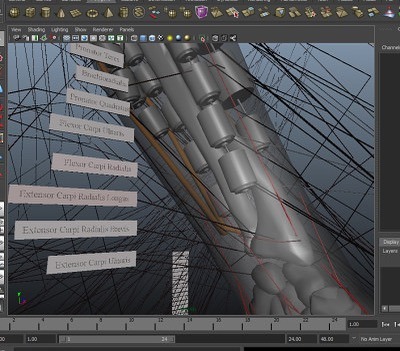
Robot blueprint forearm detail with muscles labeled
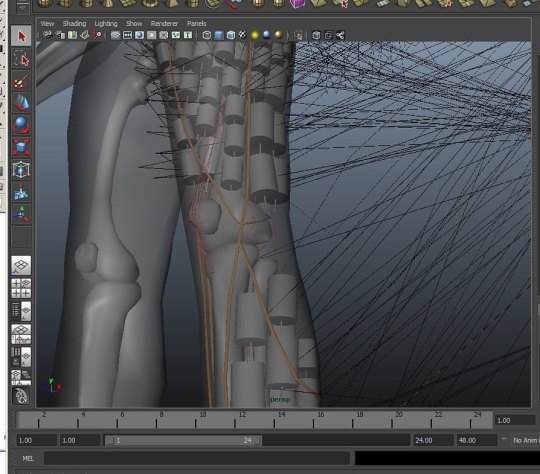
Robot blueprint leg detail motor and muscle string placements and spacing
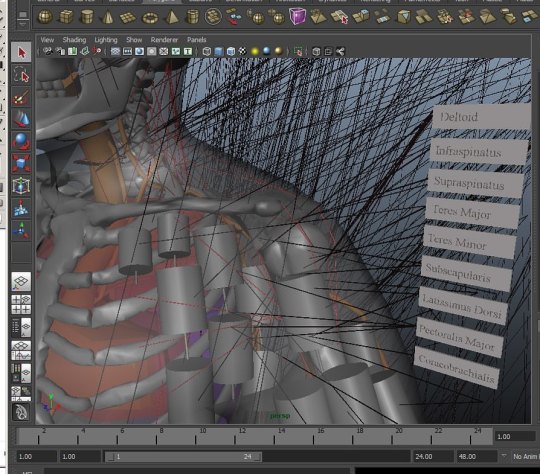
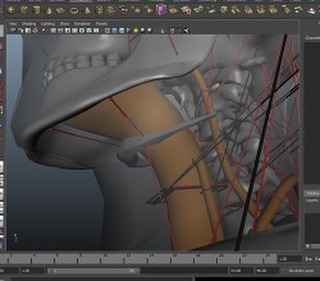
Robot shoulder blueprint detail with muscles labeled
Robot neck design which has tubing for breathing and drinking icewater for cooling systems
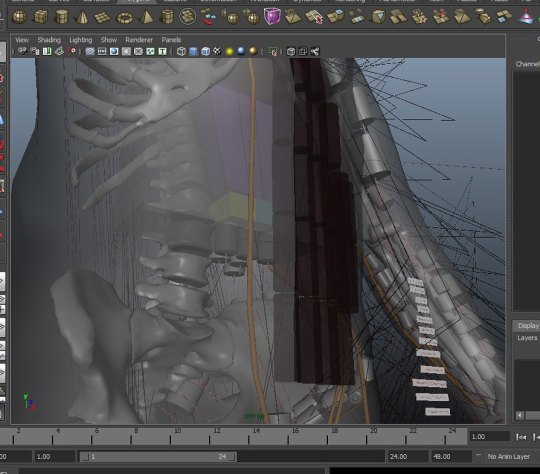
Robot blueprint midsection detail with batteries in black, a semi transparent main pc behind them, and the artificial lungs and heart behind that for cooling system
Statistics: Posted by artbyrobot — Mon Jun 27, 2022 2:09 am
]]>