Cbenson wrote:
This is quite different from autonomous robot navigation.
This is quite different from autonomous robot navigation.
Our search system also is the robot that watches TV like a human but does it simultaneously on several TV channels and this robot can watch TV nonstop and do not to get tired
Cbenson wrote:
Can you explain more about how the system would determine what video interests the user?
The user just uploads video which interests him to the search system and then system would search it on all channels that are scanned.
Also user can add own TV channel that interests him if system still does not have such channel.
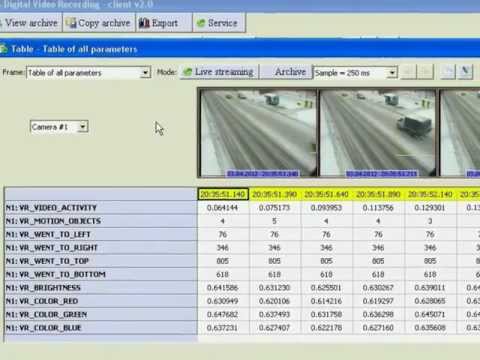
So, in other words: AVM Video Search system provides service that allows customers to make audit of TV channels or searching of forbidden or copyrighted video in file with help of automatically recognition of the video content.
The main advantage of this system is direct recognition of separate images into analyzing of video content that is provide searching of very small video fragments about two seconds long.
Statistics: Posted by EDV — Tue Jan 07, 2014 12:52 pm
]]>