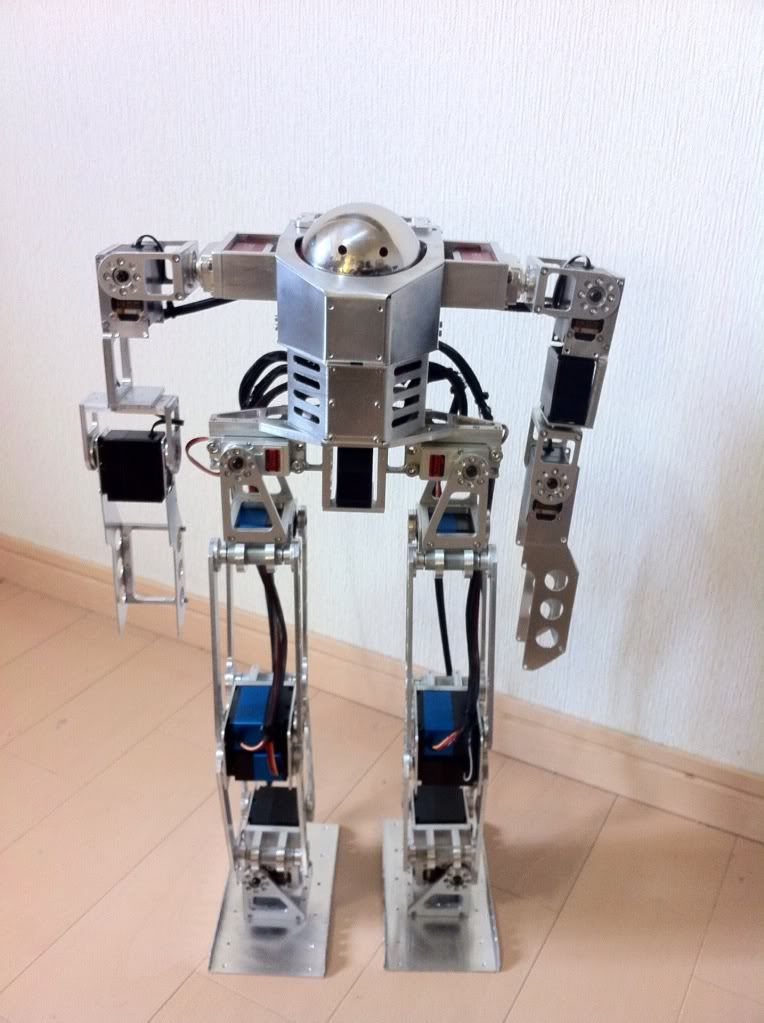
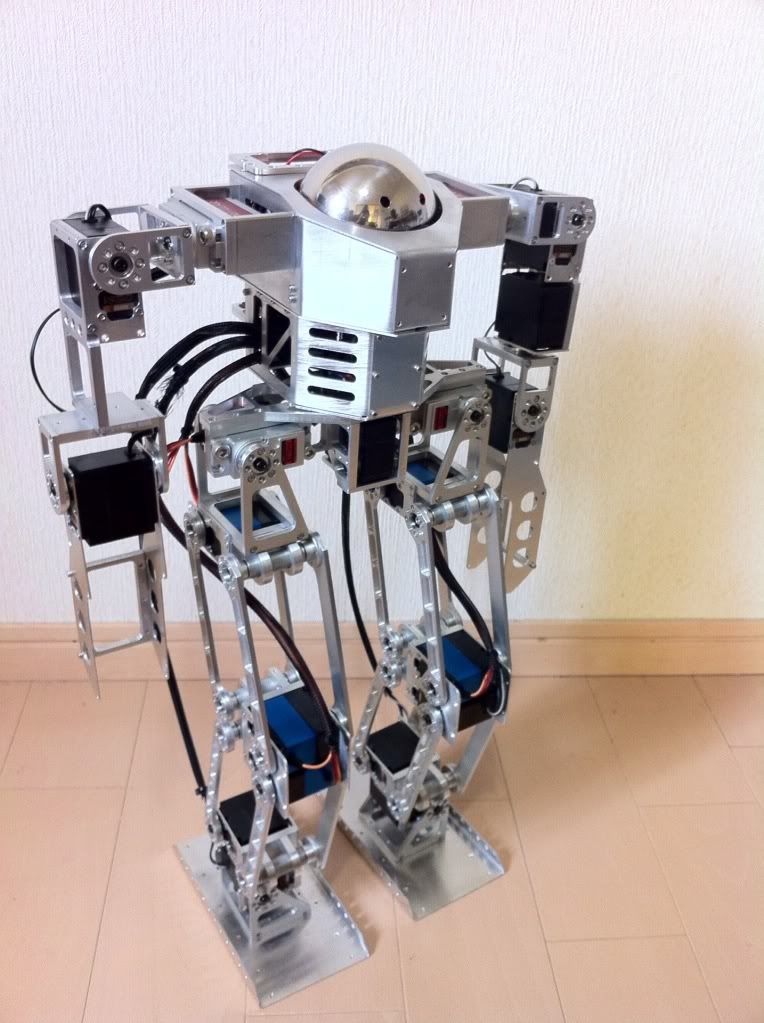
In the process of making motion programs - I have found that the shoulder servos don't have sufficient power to allow Maxwell to get up on his own. I think this may be the reason I have seen some of the Japanese builders doubling up their servos at this location.
Limor:
I designed all of the brackets - and fabricated them on a desktop CNC I have at home.
I still have quite a bit to go I think before Maxwell would be considered "ready" - but intend to take your advice to heart about practicing!
ostro_goto:
I am working on getting some videos going - but it may be a couple weeks as I tweak things like the walking gait....Statistics: Posted by clockwork — Mon Apr 02, 2012 9:02 am
]]>