We now have bezier curve motion profile functionality! The servo will carefully follow the defined curve along its path.
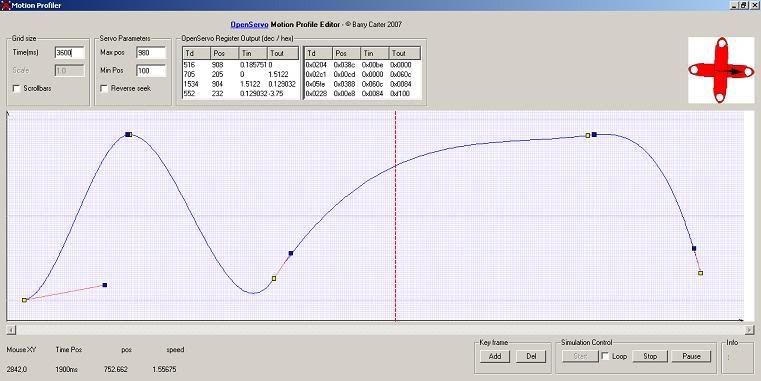
Details here.
http://openservo.com/moin.cgi/Utilities
In addition I have created a large amount of documentation for construction through to use of an OpenServo. Code Samples will be ready soon.
http://openservo.com/moin.cgi/StepByStep
Barry
Statistics: Posted by ginge — Tue Feb 13, 2007 12:56 pm
]]>