Took me many hours of non-sleep to finish the most natural movement robotic hand.
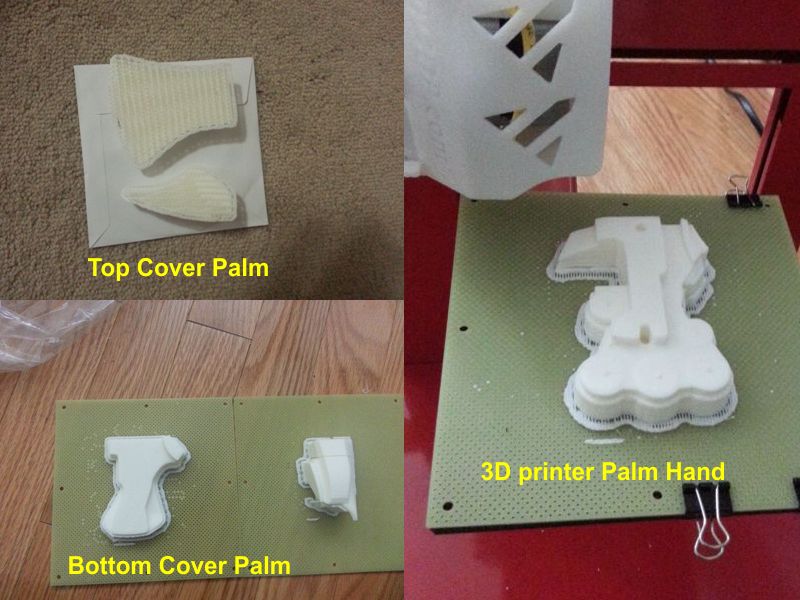
Designed and print from 3d printers.
It takes about 3 hours to print one finger, the hand took about 3 days to print.
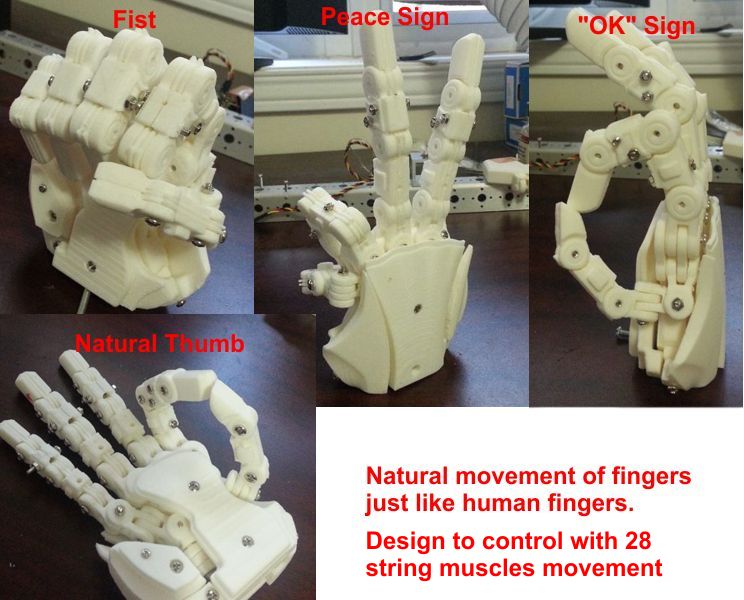
The finger can do abduction, adduction, flex and extention.
Even the palm can move too.
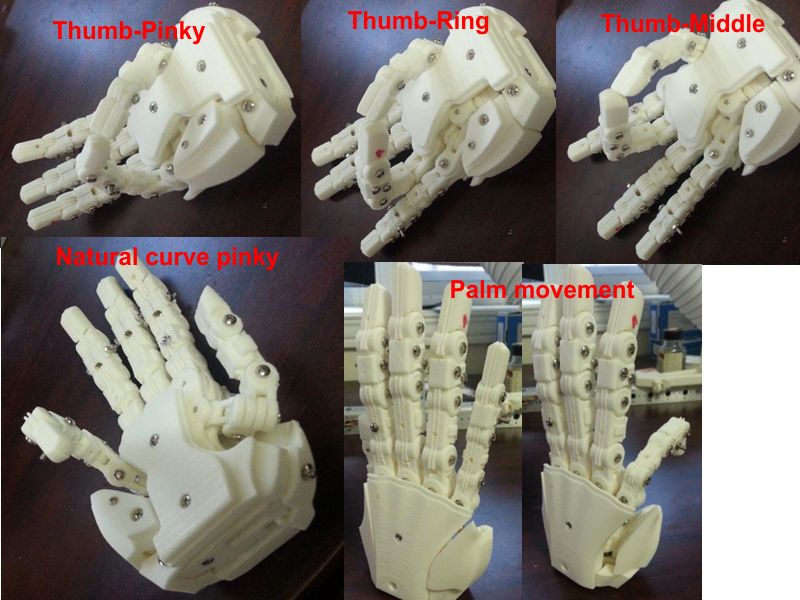
Pinky and thumb movement is almost like human.
From posing peace sign, "OK sign" and even make a fist too.
The thumb can touch all fingers.
Weight about 500g.
Designed to work with 28 Flexinol Wire muscles (try with flexionl wire... work OK)
or
14 servo
I probably going to try both to see which is better.


Statistics: Posted by AI-Bot — Wed Jun 26, 2013 9:26 pm
]]>