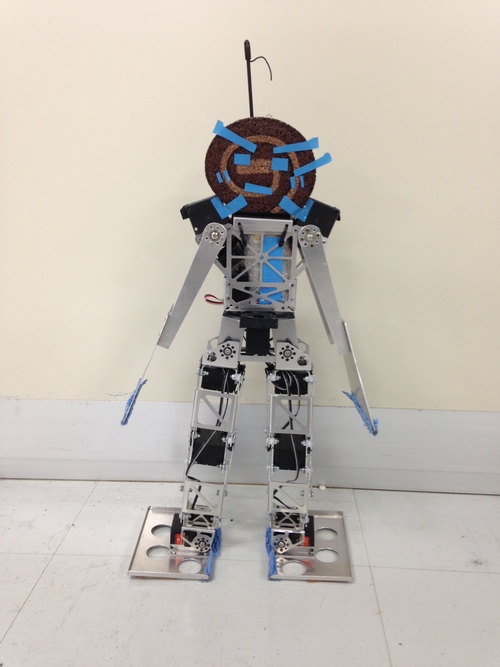
The end result of all this is that the robot can squat either leg down, just like we do, or stick a leg out to the side, while keeping the foot flat on the floor. You can see that in this image (though one foot is still tilted up here):

The weird thing is, there is no servo in the legs to rotate them around a vertical axis. No "twist" at ankle or hip. Now, in practice, the robot gets around mostly by crab-walking sideways, as is pretty typical for Robo-One robots. But it's certainly able to turn, and quite nimbly. (You can watch it in action in this video.)
I don't understand how the robot is able to turn without any leg twist. For that matter, I don't see how it could possibly walk forward/backward either, and I thought this was a requirement to qualify for Robo-One.
Anybody have any insight?
Thanks,
- Joe
Statistics: Posted by Joe — Mon Jul 01, 2013 8:59 pm
]]>