Design and construction an humanoid 60 cm using wck servos
Design and construction an humanoid 60 cm using wck servos
![]() by nicolas gomez
by nicolas gomez
Wed Jun 18, 2014 12:44 pm
Hii guys !!
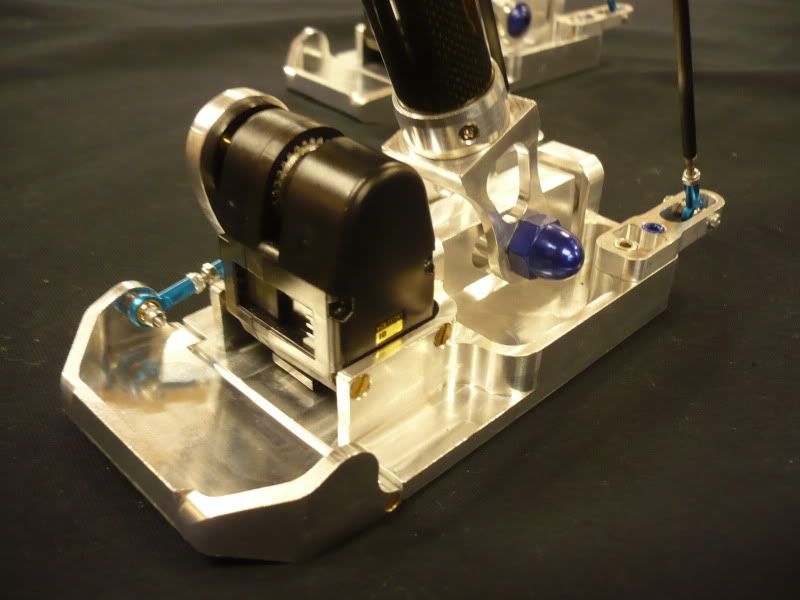
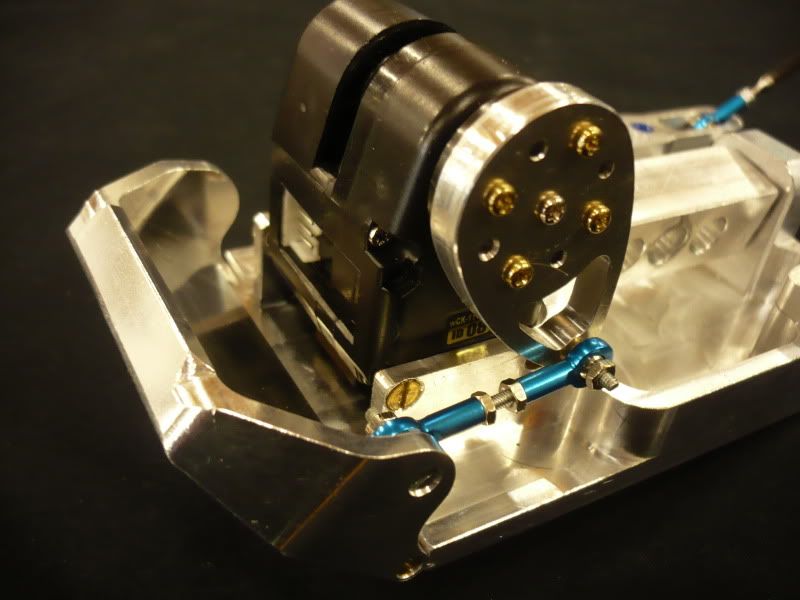
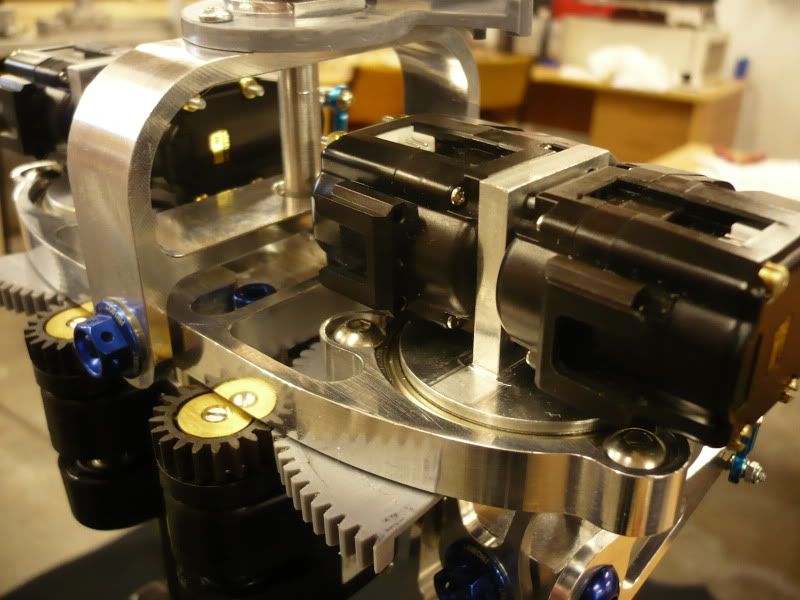
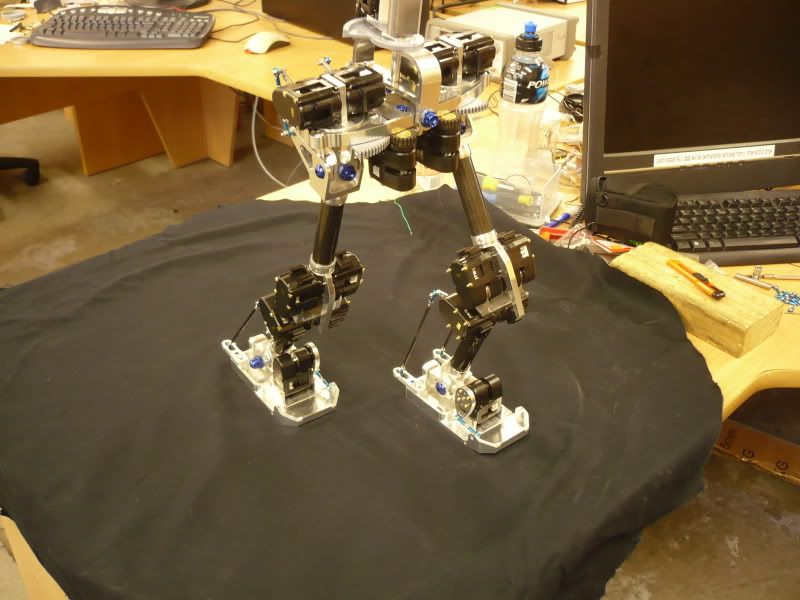
here a thesis that presents the mechanical design and construction of the lower half of a biped robot,several unique mechanical attributes have been proposed and implemented such as dual push rod actuated joint articulation. This technique produces a larger joint torque and reduces leg inertia allowing for the implementation of WCK serial controlled servo modules for actuation.
Full robot body

All parts

Ankle

Foot & Toe
Full Leg



Pelvis & Hips


Full lower body

Here the description and documentation
http://mro.massey.ac.nz/handle/10179/2904?show=full
here the pdf
http://mro.massey.ac.nz/bitstream/handle/10179/2904/02_whole.pdf?sequence=1
regards
nicolas
here a thesis that presents the mechanical design and construction of the lower half of a biped robot,several unique mechanical attributes have been proposed and implemented such as dual push rod actuated joint articulation. This technique produces a larger joint torque and reduces leg inertia allowing for the implementation of WCK serial controlled servo modules for actuation.
Full robot body
All parts
Ankle
Foot & Toe
Full Leg
Pelvis & Hips
Full lower body
Here the description and documentation
http://mro.massey.ac.nz/handle/10179/2904?show=full
here the pdf
http://mro.massey.ac.nz/bitstream/handle/10179/2904/02_whole.pdf?sequence=1
regards
nicolas
Last edited by nicolas gomez on Thu Jun 19, 2014 8:14 am, edited 1 time in total.

Re: Design and construction an humanoid 60 cm using wck ser
![]() by Captain Lotus
by Captain Lotus
Wed Jun 18, 2014 1:27 pm
love the idea. i'll follow you on that project.
Did you put some "double wCK" just be avoid weakness or have you calculated the need of two at some locations (knee for example) ?
Will you ever post the CAD files of your pieces ?

Re: Design and construction an humanoid 60 cm using wck ser
![]() by nicolas gomez
by nicolas gomez
Thu Jun 19, 2014 8:57 am
Captain Lotus wrote::P
love the idea. i'll follow you on that project.
Did you put some "double wCK" just be avoid weakness or have you calculated the need of two at some locations (knee for example) ?
Will you ever post the CAD files of your pieces ?
Hi!!
it's not my project, is of the University Palmerston North, New Zealand,in the pdf file,you can find all the answers,
like measure of torque servos ,inertia reducion,dynamic drift testing of the servos
so far I have not seen the available CAD
regards