ID3h-r










![]() by Innerbreed
by Innerbreed
Tue Jun 22, 2010 11:18 am
hi. The parts are from lynxmotion. unfortunately i did photo the build process but i will tell you a bit more about the project.
i have been looking at creating a new 3DOf leg design without using the conventional Lynxmotion Systems, and to make something slightly different.
i stumbled across Franks Robots on youtube:
http://www.youtube.com/watch?v=Ri4uy7Sb1rI
from this i have used a selection of systems to create this




the body was built using lynxmotion hexapod chassis:

This is the parts list! the servos are hs645Mg servos and not the ones shown.
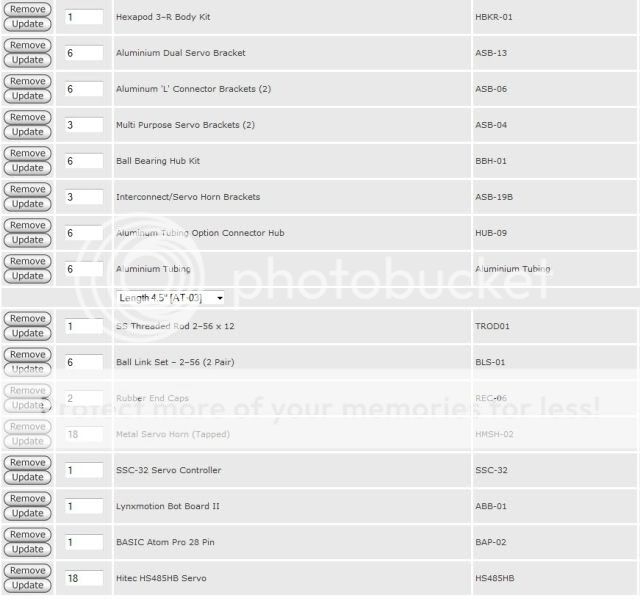
the femur leg sections wee made up by lynxmotion for this project. they are 4"
we are having a few mechanical problems as well as the known phoenix/h3r code conversions problems
As a prototype concept i like to make sure im getting as many problems with it as i can. so the improvements can be made for future builds.
At the moment we know that the legs are not as strong and the rods need reinforcing or changing. im popping out at some point today to pick up some new parts that i think will help.
Another very surprising thing is, is that its heavier than previous hexapods.
Weight (w/out batteries)
AH3 = 3lb 13oz.
Phoenix = 3lb 10oz.
ID3 = 4lb 10oz.
the weight is making the rods pop out from their threads and also bending due to force when walking. (mainly during rotation)
just some more pictures:





i have been looking at creating a new 3DOf leg design without using the conventional Lynxmotion Systems, and to make something slightly different.
i stumbled across Franks Robots on youtube:
http://www.youtube.com/watch?v=Ri4uy7Sb1rI
from this i have used a selection of systems to create this
the body was built using lynxmotion hexapod chassis:
This is the parts list! the servos are hs645Mg servos and not the ones shown.
the femur leg sections wee made up by lynxmotion for this project. they are 4"
we are having a few mechanical problems as well as the known phoenix/h3r code conversions problems
As a prototype concept i like to make sure im getting as many problems with it as i can. so the improvements can be made for future builds.
At the moment we know that the legs are not as strong and the rods need reinforcing or changing. im popping out at some point today to pick up some new parts that i think will help.
Another very surprising thing is, is that its heavier than previous hexapods.
Weight (w/out batteries)
AH3 = 3lb 13oz.
Phoenix = 3lb 10oz.
ID3 = 4lb 10oz.
the weight is making the rods pop out from their threads and also bending due to force when walking. (mainly during rotation)
just some more pictures:
![]() by Innerbreed
by Innerbreed
Thu Jul 01, 2010 7:24 pm
As promised. 
Bit of a pain controlling it while holding a camera.
http://www.youtube.com/watch?v=WwJTUGw7hQg
Bit of a pain controlling it while holding a camera.
http://www.youtube.com/watch?v=WwJTUGw7hQg