First steps of Kondo!
First steps of Kondo!
![]() by irina andrea
by irina andrea
Tue Jun 16, 2009 8:27 am
I already have assembled Kondo and adjusted with the trim, but Kondo does not walk even with the motions that I have loaded.
My question is: Is Kondo able to walk well before the implementation of Gyro Sensor?. Is too dificult to adjust it to walk well.
Thanks you very much

![]() by Ray
by Ray
Tue Jun 16, 2009 11:37 am
Assume you are having KHR2HV,
It should walk on a flat floor, although a gyro is better.
If it walks on tiled floor or even on a carpet it will most likely fall.
You can find the following document helpful:
http://ixs.co.jp/en/products/robot/engl ... kondo.html
good luck.
Ray.

![]() by Dave
by Dave
Tue Jun 16, 2009 2:29 pm
The home position is the most important part of the set up with the kondo. Trimming it took me a while. A got him to walk a few times, only to realise he fell. SO back to the home postion. I went back and forth until he was stable by trimming the leg servos to give him good ish balance. I have him walking on a flat ground quite well now, he does wobble a bit back and forth but manages to stay upright without any aids. I also found that the lineup given by kondo and the actual holes on the robots legs (the ones in the manual which should all line up) are not lined up for me. To get the best out of the supplied motions my home position is customised quite a bit from what it "should be". The guide posted above will help loads! I think to get it right is literally trial and error. even now i cant get mine to walk backwards, everytime i try it he stubs his left foot , it just doesnt lift properly. I is really annoying to be honest. I wish the setup was easier on these thigns sometimes.
My next purchase will be a gyro, or two. These should really give him the stability .
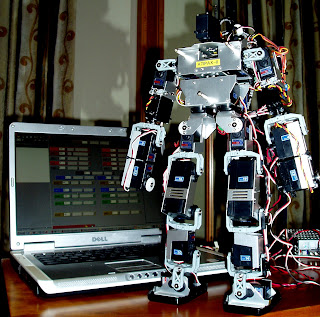
Want to get him on some carpet soon. Oh btw, here is my khr 2hv, with 2 additional dof. A few more to come aswell in future when i can design parts. The two elbow brackets were simple to design and when the actual part got delivered i was really happy with the result! (there the two cream coloured parts on each arm servo acting as elbows)

![]() by irina andrea
by irina andrea
Wed Jun 17, 2009 1:38 am
If is so difficult doing to walk forward, I can`t imagine how it will be complicated to do walk backwards. For now I will concentrate on doing so give at least two steps well without the need of Gyro, and yeah, the best way is like you say a trial and error.
Gracias Totales!
![]() by Dave
by Dave
Wed Jun 17, 2009 5:14 pm
I also think your right in getting the walk forward done first. Unfortunately it is a lot of trial and error. Although i like it because we can all have different and slightly modified motions.
Testing out the new elbows tonight so we shal see how that goes.
Then on to giving him waist rotation.
I already have an idea how to get an additional servo in the body above the hip rotation kit. So hopefully ill have a design soon and then can get the parts made!
If you have any trouble let me know see if i or anone else can help you!!
Dave
![]() by irina andrea
by irina andrea
Tue Jun 23, 2009 5:50 am
Finally Kondo already walks well, I can load all motions and play the most without any problem. I fit well trim (almost the same as the manual), and set the StarUpMotion for turn on it. I´m so happy because He does the most of motions well; just the fist to the right motion it falls, I would have to modify the motion step by step.
Trying to handle the gyro
![]() by irina andrea
by irina andrea
Tue Jun 23, 2009 7:03 am
Now I trying to use the gyro, but I don´t know if I doing it well. I have anly a gyro that I want to use it to give to Kondo lateral stability ie from right to left.
First I set the gyro like the G2 position

but when I modified a preset motion to put several SET and adjust some servos in mixing, I realized that the gyro was compensated from back to forward and not from right to left, then I changed to G1 position and did the necessary adjustments but I dont note the diference betwen a motion without gyro and a motion with compesation of Gyro, in neither case is dropped but I can´t implement a faster walk with the gyro without dropping
Irina xD
![]() by igor
by igor
Sun Jun 28, 2009 2:15 am
About gyro sensor, you take care when mount it. The pins connection should be to back side. If change it, the real gain will be inverted.
On the other hand, could you verify the values on ANALOG window? it should be correspond with gyro movement. Take the robot and turn to right side and see the analog value. If it is positive then apply to correspondant servos.
Hey Dave, your robot looks good.
I have a 1HV tunned. Do you want to see it?
It has five aditional servos for waist, elbows and hands (may be future grippers).
For more details see my blog http://atipaxbot.blogspot.com/ (in spanish)
If interest information in english let me know and will post in two languages.
![]() by irina andrea
by irina andrea
Mon Jun 29, 2009 12:56 am
Well, I think so with the gyro can I deal, in fact, has served me much the bipedolandia's forum in Spanish and is a great coincidence and surprise for me that Igor also post here.
Althoug for some reasons and after several many test, I thik that Kondo can walk very well without gyro, just is correctly set the trim. Anyway I have only a gyro and surely I`ll use for lateral stability.
For now I focused on communication, the idea is use the low speed terminal for execute a motion in El Bicho from hyperterminal initially
i need to use a MAX232 and all necesary circuit arrangements for the serial communication... I will tell you how I go with this.
![]() by Dave
by Dave
Mon Jun 29, 2009 8:55 am
I was looking into the idea of waist rotation too. Havent designed anything as of yet. Im working on hands. Got some ideas drawn up just need them made and then onto testing!
Cool site too. How well does your kondo walk with the added DOF???
Dave
![]() by igor
by igor
Mon Jun 29, 2009 11:47 pm
We're waiting your notices about serial communication.
Hi Dave, my Kondo does not walking very good yet, but stands up ok!
http://www.youtube.com/watch?v=9mmWIMwQ1L0
I hope it can walk and fight for competiton in Campus Party Valencia (Spain)
![]() by igor
by igor
Thu Jul 02, 2009 12:47 am
You could activate the mov's previously recorded in RCB-3. May be with Terminal program or similar one.
I used a Basic Stamp 2 module to generate the frames similar to KRC-1 (two bytes) and my idea is to genereate the frames like REV-1 (six bytes) to use the PA1 to PA4 variables.
Ok, the KCB-1 card make it. but...