Hobby Humanoid robot KHR3HV rides bike at 10k/h
Hobby Humanoid robot KHR3HV rides bike at 10k/h
![]() by nunogato
by nunogato
Fri Oct 21, 2011 6:48 pm
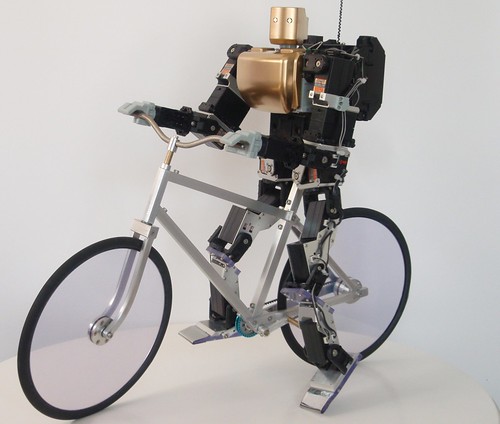
primer_v2 by RoboSavvy, on Flickr
The robot pedals with his feet at variable speed. The steering is done by the robot hands as with a normal bike, and remote controled by a human.
Stability is acheived by relying on the inertial centrifugal effect of the front wheel and on a gyro aided by a PID controller that takes over streering when driving in a straigh line. Seems like when the robot steers his arms he also bends the waist leaning a bit into the turn. Breaking is acheived by taking the feet off the pedals and pointing them down to the ground using the metal feet as friction breaks.
He is able to walk backwards and forwards while in break mode with feet pointing to the ground and he gets back into pedaling by lifting one foot onto a pedal then the other, starting to pedal and then the PID controller kicks in. Seems like there is human intervention when going from breaking position to lifting the first foot involving setting the pedal at the lowest position.
A small (6 deg) angle lags between the leading foot and the other so that the leading foot is pushing down since the foot moving up is not pulling the pedal. This prevents from the foot coming up from interfering the the downwards torque action of the other foot.
Check the video

![]() by limor
by limor
Sun Oct 23, 2011 11:44 am
A number of very thorough studies have been done. Neither "inertia" or "centrifugal effect" from either front wheel or rear contribute anything significant to the stability of a bicycle. [wired.com] The fact is that even today, we do not fully understand the phenomenon. The only thing we are sure of is that it does not work the way most people think it does.
![]() by Fabrizia
by Fabrizia
Wed Nov 23, 2011 6:20 pm

![]() by beccasims
by beccasims
Tue Dec 13, 2011 8:54 am
Fabrizia wrote:This is an amazing build! I would never have thought that this would even be possible, or at least be nearly impossible to achieve. I am very impressed with the design of this robot, this is one of the most impressive technological achievements I have seen in a while. I have been trying to remember the name of this technology company that is known for it's work but I am thinking on a blog about this, and I cannot remember their name for the life of me. I was trying to tell my friend about them because he is looking for work in this area. If anyone knows who I'm talking about, I would appreciate your help. Thank you.
Wow! That's a great news. This can really help people to automate its pedaling. I hope the scientists will develop and automate many things.
cycling KHR-3HV
![]() by mkegruber
by mkegruber
Tue Dec 13, 2011 12:46 pm
I was lucky to be at IREX and saw this robot in person. I also had a chance to ask Dr Guero about the robot. The processing is done with a small form board running Linux.
Regards
Michael
Re: cycling KHR-3HV
![]() by limor
by limor
Tue Dec 13, 2011 11:51 pm
mkegruber wrote:Hi,
I was lucky to be at IREX and saw this robot in person. I also had a chance to ask Dr Guero about the robot. The processing is done with a small form board running Linux.
Regards
Michael
Any more info and pictures will be much appreciated!
![]() by PeteRobotman
by PeteRobotman
Wed Dec 14, 2011 10:55 pm
Fabrizia wrote:This is an amazing build! I would never have thought that this would even be possible, or at least be nearly impossible to achieve. I am very impressed with the design of this robot, this is one of the most impressive technological achievements I have seen in a while. I have been trying to remember the name of this technology company that is known for it's work with accident reconstruction, and I cannot remember their name for the life of me. I was trying to tell my friend about them because he is looking for work in this area. If anyone knows who I'm talking about, I would appreciate your help. Thank you.
This is an amazing achievement. Not long ago a truck the size of a full size RV was required to house the computers to go 3 mph along a road that had white lines painted on both sides…and that was considered a world breaking achievement.
Hey Fabrizia, in what country is the company that you are inquiring about? Any clues to the location or city would be extremely helpful.
Cheers, Pete.
![]() by Dipper
by Dipper
Tue Jan 03, 2012 3:18 pm
Brilliant build!
![]() by Thex1138
by Thex1138
Tue Jan 10, 2012 12:22 pm
When I saw it I couldn't believe it.
Have a great day!
![]() by Daris
by Daris
Sun Jan 22, 2012 11:07 pm
Dipper wrote:The robot pedals with its feet at variable speed. The steering is done by the robot hands as with a normal bike, and remote controlled by a human. Stability is achieved by relying on the inertial centrifugal effect of the front wheel and on a gyro aided by a PID controller that takes over steering when driving in a straight line.
It would be nice too if they can upgrade it to cycle a bit on its own, now that would be extraordinary. Nevertheless, it looks amazing!
Daris
Re: cycling KHR-3HV
![]() by kenbright
by kenbright
Thu Oct 18, 2012 7:19 pm
mkegruber wrote:Hi,
I was lucky to be at IREX and saw this robot in person. I also had a chance to ask Dr Guero about the robot. The processing maschine is done with a small form board running Linux.
Regards
Michael
Damn, you're a lucky guy to see this one in real.
Re: Hobby Humanoid robot KHR3HV rides bike at 10k/h
![]() by Robert Webber
by Robert Webber
Wed Oct 23, 2013 1:10 pm