Darwin-LC(not OP) CAD files

![]() by Gort
by Gort
Sat Oct 20, 2012 12:53 am
The CM-900 is now out!!!!
This is the board I want to use with the Raspberry Pi to make a poor mans version of the CM-730 and FitPc in the DARwIn-OP!!!!
http://mike-ibioloid.blogspot.com/2012/ ... w-out.html
This is the board I want to use with the Raspberry Pi to make a poor mans version of the CM-730 and FitPc in the DARwIn-OP!!!!
http://mike-ibioloid.blogspot.com/2012/ ... w-out.html
![]() by i-Bot
by i-Bot
Sat Oct 20, 2012 12:38 pm
I-Bot one question. Why do you say this?
"The CM-730 is useless for a low cost/low weight DARwin"
What does the CM730 do?
You must remember that the DARwin setup is rather different to that of a standard Bioloid. In the standard bioloid the CM5/CM510/CM530 is the robot controller, storing the motions and tasks and then running them through motion engine. In DARwin the Fit-PC performs that function, not the subcontroller. While the CM730 is more powerful than the CM510 it does a lot less. It is actually just a communication controller plus a few peripherals (IMU, LED, servo power switch). These functions can be performed at much less space, weight and cost. On top of this the CM730 communicates over USB using an FTDI chip. The FTDI chip is a horrible waste of embedded linux resources to the point of being deadly to the Pi.
What is the cost ?
The CM730 is big, and has lots of daughter boards and special cables, great in DARwin-OP, but a mess in a smaller humanoid.
It is expensive and not very available.
The size and weight are way over the top. The communication functions can be done in a USB2AX, and even these are not essential.
Basic power control functions can be done in CM510. The servo power function is not essential to DARwin. It just cuts the servo power, which is bit daft when the servos are intelligent.
What about the CM-900 ?
I didn't see the schematic or full spec. yet. If it has IMU that might add value as that was a sad omisson from the CM530. Also if they now use the USB interface on the STM32 chip rather than the FTDI, this would reduce the USB problem, though probably not enough to use with the Raspberry Pi.
It will be interesting to see if they target the CM-900 as a controller or sub-comtroller, and what code they release for it. Cortex M3 is a bit old now, the Cortex M4 with fpu are now available at similar cost and would be better for a controller.
![]() by i-Bot
by i-Bot
Sat Oct 20, 2012 4:20 pm
I decided early on that I was not going to fully document and publish my DARwin-pi due to lack of time. I did offer Robosavvy a colaboration and commercialisation of the package, but they are busy with other projects and ventures as you see elsewhere on the site.
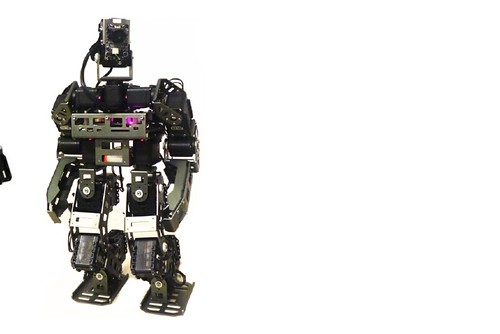
For the head I use 9g micro servos. The pan servo fits into the body without modification, and the tilt and camera are in the standard premium head, though I think a new 3D printed one would look better.

The PCB at the top of the head supports the head and eye RGB LEDs the same as DARwin, and also the servo drivers. It connects to the DXBus and presents the micro servos and LEDS as normal dynamixel devices. There is enough 5V power to spare for the webcam if needed.

The Raspberry Pi is fitted to the front of the bioloid after the normal chest is removed. The case is cut from 2mm acrylic to just expose the USB connectors. The USB devices must be low profile, hence the nano Wifi and the cut down connector for the Webcam.

To fit at the bottom without the SD card sticking out, I use an Adafruit half height micro SD adapter.

The daughter board on the Raspberry Pi contains:
5V 1.5A switching regulator to convert from DXBus power to 5V
3.3V regulator
Serial Bluetooth on Raspberry Pi serial port
9 Axis Pololu IMU 9 on I2C bus
SPI to Dynamixel Bridge.
The PCB version will also have audio power amp.

The DARwin software is changed to use new LinuxSPISerial and LinuxIMU drivers instead of LinuxCM730. Other framework changes are made to adapt to differences, but are quite minor.
The WLAN and the webcam are the only devices on the USB because the USB is a problem for the Pi. They are both high speed.
The dynamixels are driven from the Raspberry Pi SPI bus with the low latency SPI drivers. The SPI to Dynamixel bridge uses an NXP SPI UART which has 64 byte fifos and supports automatic RTS control in hardware. This configuration resolved the big problems I had with running the dynamixels on USB.
I will put up some better full pose pictures and video of the ball following and walking when I get time.
For the head I use 9g micro servos. The pan servo fits into the body without modification, and the tilt and camera are in the standard premium head, though I think a new 3D printed one would look better.
The PCB at the top of the head supports the head and eye RGB LEDs the same as DARwin, and also the servo drivers. It connects to the DXBus and presents the micro servos and LEDS as normal dynamixel devices. There is enough 5V power to spare for the webcam if needed.
The Raspberry Pi is fitted to the front of the bioloid after the normal chest is removed. The case is cut from 2mm acrylic to just expose the USB connectors. The USB devices must be low profile, hence the nano Wifi and the cut down connector for the Webcam.
To fit at the bottom without the SD card sticking out, I use an Adafruit half height micro SD adapter.
The daughter board on the Raspberry Pi contains:
5V 1.5A switching regulator to convert from DXBus power to 5V
3.3V regulator
Serial Bluetooth on Raspberry Pi serial port
9 Axis Pololu IMU 9 on I2C bus
SPI to Dynamixel Bridge.
The PCB version will also have audio power amp.
The DARwin software is changed to use new LinuxSPISerial and LinuxIMU drivers instead of LinuxCM730. Other framework changes are made to adapt to differences, but are quite minor.
The WLAN and the webcam are the only devices on the USB because the USB is a problem for the Pi. They are both high speed.
The dynamixels are driven from the Raspberry Pi SPI bus with the low latency SPI drivers. The SPI to Dynamixel bridge uses an NXP SPI UART which has 64 byte fifos and supports automatic RTS control in hardware. This configuration resolved the big problems I had with running the dynamixels on USB.
I will put up some better full pose pictures and video of the ball following and walking when I get time.
![]() by limor
by limor
Sun Oct 21, 2012 1:29 pm
i-Bot : too busy ?!
never for you
we are also working on RPi based robot but for Bioloid and RoboBuilder I prefer to use another (faster, smaller) cpu. I'm referring to the Alwinner A10 cpu Android sticks that are available for same price as RPi on Amazon.
Anyway as you well know robot electronics these days have a 3 month lifespan so lets try to put a Bioloid kit upgrade together asap. i'll follow up with an email
never for you
we are also working on RPi based robot but for Bioloid and RoboBuilder I prefer to use another (faster, smaller) cpu. I'm referring to the Alwinner A10 cpu Android sticks that are available for same price as RPi on Amazon.
Anyway as you well know robot electronics these days have a 3 month lifespan so lets try to put a Bioloid kit upgrade together asap. i'll follow up with an email
Re: Darwin-LC(not OP) CAD files
![]() by wiweet
by wiweet
Tue Apr 08, 2014 5:20 pm
greeting i-Bot, I think I've found the answer for my question. Thank you for sharing the idea.
regards,
wiweet
regards,
wiweet