Propellor Head
Propellor Head
![]() by i-Bot
by i-Bot
Tue Jan 01, 2008 4:44 pm
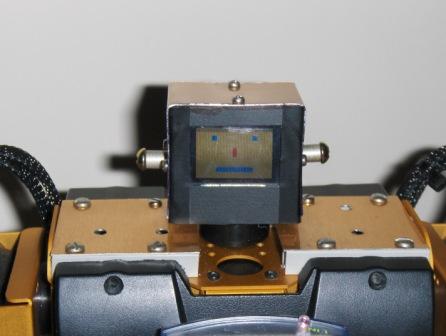


The head contains a 4D systems uOLED-96-PROP with a 96 * 64 colour display, and a Propellor processor.
http://www.4dsystems.com.au/prod.php?id=14
I have been on vacation, so little progress. I now need to package it properly to get connections to program the propellor in situ, and to get access to the SD card slot.
On the software side, I have now linked it to the C3024 as an I2C slave to the C3024 I2C master. The spare two pins are an I2C master for comms and sensors.
I need to decide what radio to use. I don't think any radios will work between a PC Propellor tool and the chip.

![]() by NovaOne
by NovaOne
Tue Jan 01, 2008 5:12 pm

Now all I have to do is learn how to program it
Thanks again, for the I2c flash upgrade, hope to be using it soon.
![]() by NovaOne
by NovaOne
Tue Jan 01, 2008 5:32 pm
Can we discuss the type of control architecture you are thinking of for your RN?
I was going to have the Propeller handle all i2c devices, plus bluetooth and more. Leaving only the gyros (and maybe foot sensor modules
I am also quite keen on fitting a wifi enabled gumstix in RN chest for future projects......?
May i ask what your plans are? ie if the Propeller is the i2c slave, does this mean you intend to continue to use the c3024 (and therefore RoboBasic) as the "Host" controller in your RN for the time being?
I am I being too simplistic, but isn't the Propeller chip running Spin significantly faster and more powerful than the Atmega128 running RoboBasic?
![]() by Robo1
by Robo1
Tue Jan 01, 2008 10:02 pm
I have been reading up on these screens and was leaning in the direction of the serial version as it has all the commands built in and you just have to link it up to the RX/TX. What do people think, can you think why the propeller version would be better.
Bren
![]() by JavaRN
by JavaRN
Tue Jan 01, 2008 10:18 pm
Thanks
Charles
![]() by i-Bot
by i-Bot
Tue Jan 01, 2008 11:09 pm
The 4D PROP board does have some limitations with only 6 IO pins, which means 3 busses. I was thinking one for a wireless uplink to remote PC, One to link to C3024, and one for sensors etc, much as NovaOne describes.
The PROP is memory challenged, with limited program and RAM storage, but potentially massive flash storage on SD. The C3024, has plenty of ports, so should probably keep the servo tasks. Whether I2C or serial between the C3024 and PROP, I will probably use custom code in the C3024 and not standard friemware. Not sure whether to keep Gyros on C3024, or use IMU on the PROP sensor bus. I still want to retain access to the craftbase of RoboNova moves under Robobasic
I am still not convinced on the PROP . I am sure someone will jump on my head when I say "I find the PROP is a bit of a hackers processor", but it seems difficult to integrate to a structured robotic development environment , and I think this is also very important. I am still thinking Java /C# + Linux over an FPGA servo controller as being capable of a more object orientated and open solution. I agree with NovaOne that the PROP will likely not be at the top of the food chain. for the robot.
However, I will keep and develop the LCD face, either on PROP or serial. Even a humaniod needs a window to their soul !
![]() by NovaOne
by NovaOne
Tue Jan 01, 2008 11:09 pm
JavaRN, i-bot has used two of the spare i/o pins for his i2c slave interface, not the Rx & Tx pins
PS
Looks like our posts crossed over again i-bot, excellently explained, when in comes to "Propellers" I really don't know much ....yet.
......did i see talk of IMU's
![]() by NovaOne
by NovaOne
Wed Jan 02, 2008 12:21 am
I've thought about storing moves on a EEPROM before, but as long as variables can't be inserted to RoboBasic move commands, i don't see how?
Data logging sounds useful. eg of biped foot sensor data, 2Gb..... enough space for a soul, or should that be sole?
![]() by i-Bot
by i-Bot
Fri Jan 04, 2008 6:01 pm
There appears to be lots of potentialy useful PROP objects available for this: I2C, displays, and SD/FAT. Even without direct feedback link to the C3024, the data logging possibilites are immense.
![]() by NovaOne
by NovaOne
Fri Jan 04, 2008 7:02 pm
..excited by the window on the sole idea.
Yes so am I, it would also be useful while programming "catch and play" to ensure each posed position is in optimum balance.
I'm a long way off this, what with having to learn Spin and still not having a repeatable/usable FSR mounting method for my RN yet.
I'd like to ask if we can work on this together.. but I doubt i can help much yet?
What do you think i-Bot?
PS
"amazing" stair climb
![]() by limor
by limor
Thu Jan 17, 2008 10:24 pm
http://robosavvy.com/store/index.php?ma ... rers_id=22