Supernova-1
Supernova-1
![]() by MYKL
by MYKL
Tue Jan 15, 2008 8:52 pm
Hello Kinsmen,
I have finished developing my anime inspired hands for the Hobbybot scale arena. I want to be able to actuate as many of the phalanges as posible. So, I am thinking about making a beast machine out of 2 (two) Robonovas. One board and servoset to control the upper body and another to control the lower. It'll be big. But it'll have doubled up servos.
I'm redesigning all the bracketry and setting up the mechanics a bit differently. I'll also be making it look like a Mecha-Type thing rather than a pile of servos...
I'll finish up the CAD and post it here.
Whuddya think of this idea?
Will it be possible to program each half with the existing Robonova software?
I have finished developing my anime inspired hands for the Hobbybot scale arena. I want to be able to actuate as many of the phalanges as posible. So, I am thinking about making a beast machine out of 2 (two) Robonovas. One board and servoset to control the upper body and another to control the lower. It'll be big. But it'll have doubled up servos.
I'm redesigning all the bracketry and setting up the mechanics a bit differently. I'll also be making it look like a Mecha-Type thing rather than a pile of servos...
I'll finish up the CAD and post it here.
Whuddya think of this idea?
Will it be possible to program each half with the existing Robonova software?
Last edited by MYKL on Wed Feb 06, 2008 7:48 pm, edited 1 time in total.
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047

![]() by Robo1
by Robo1
Tue Jan 15, 2008 9:48 pm
If your going to use two RN why not use a better servo in the first place like the DX-117 rx-64 or hitec TG series!
Making a RN bigger will put a lot of force on the standard servo and they wont be up to the job.
just my thoughts but would still love to see a CAD design.
Bren
Making a RN bigger will put a lot of force on the standard servo and they wont be up to the job.
just my thoughts but would still love to see a CAD design.
Bren
![]() by MYKL
by MYKL
Tue Jan 15, 2008 11:10 pm
I'm working on getting two units for the price of one.
The price of 16 servos and a control board alone is more than the $750.00 apiece I've offered for the kits.
My redesign won't be much taller. I have worked out a way to get the servos to work in tandem. The machine will have a lot more torque and thus should be able to handle a bit more speed.
I want to use the servo feedback for programming movement still.
Are there any rules that restrict a person from using two control boards in thier 'bot?
The price of 16 servos and a control board alone is more than the $750.00 apiece I've offered for the kits.
My redesign won't be much taller. I have worked out a way to get the servos to work in tandem. The machine will have a lot more torque and thus should be able to handle a bit more speed.
I want to use the servo feedback for programming movement still.
Are there any rules that restrict a person from using two control boards in thier 'bot?
Last edited by MYKL on Thu Jan 17, 2008 1:52 am, edited 2 times in total.
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
![]() by MYKL
by MYKL
Thu Jan 17, 2008 1:49 am
$1500.00 later I am the proud owner of 2 (two) Robonova-1 sets.
Now I shall model up the parts and putter with my Robonova-2X.
Upper body first I think. 'Cause the anime style hands are freakin' cool.
I want to give this monster some personality. A cross between a Landmate, Patlabor and Terminator.
No one has any thoughts on this?
Now I shall model up the parts and putter with my Robonova-2X.
Upper body first I think. 'Cause the anime style hands are freakin' cool.
I want to give this monster some personality. A cross between a Landmate, Patlabor and Terminator.
No one has any thoughts on this?
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
![]() by MYKL
by MYKL
Fri Jan 25, 2008 8:19 pm
I received the first 'bot last night and have modeled one of the servo configurations and a couple of the brackets. I was quite surprised by the diminunative size of the servo control board. I will model up the rest of the parts including the board so that I can assembe my Robonova-1 virtually. Then I will use this first kit to design my final hand set and post a piccy of what it looks like. Then I will take those parts and assimilate (heh) them into my own design. I believe this first kit will be used for the legs...
I definatly need to give the 'bot a more menacing visage. I also will make his limbs lighter and quicker by useing more efficient placement of the servo motors for hightened mechanical advantage and materials that allow me to build a more appealing exoskeleton. I want to re-design with LiPos for power and will search for info on people that have included these along with the safety circuitry that must accompany them.
The problem then is I shall have to teach him to walk with these new wheels and that appears at this point to be quite a project in itself.
^_^
I definatly need to give the 'bot a more menacing visage. I also will make his limbs lighter and quicker by useing more efficient placement of the servo motors for hightened mechanical advantage and materials that allow me to build a more appealing exoskeleton. I want to re-design with LiPos for power and will search for info on people that have included these along with the safety circuitry that must accompany them.
The problem then is I shall have to teach him to walk with these new wheels and that appears at this point to be quite a project in itself.
^_^
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
![]() by MYKL
by MYKL
Fri Feb 01, 2008 5:44 pm
{kind=link}
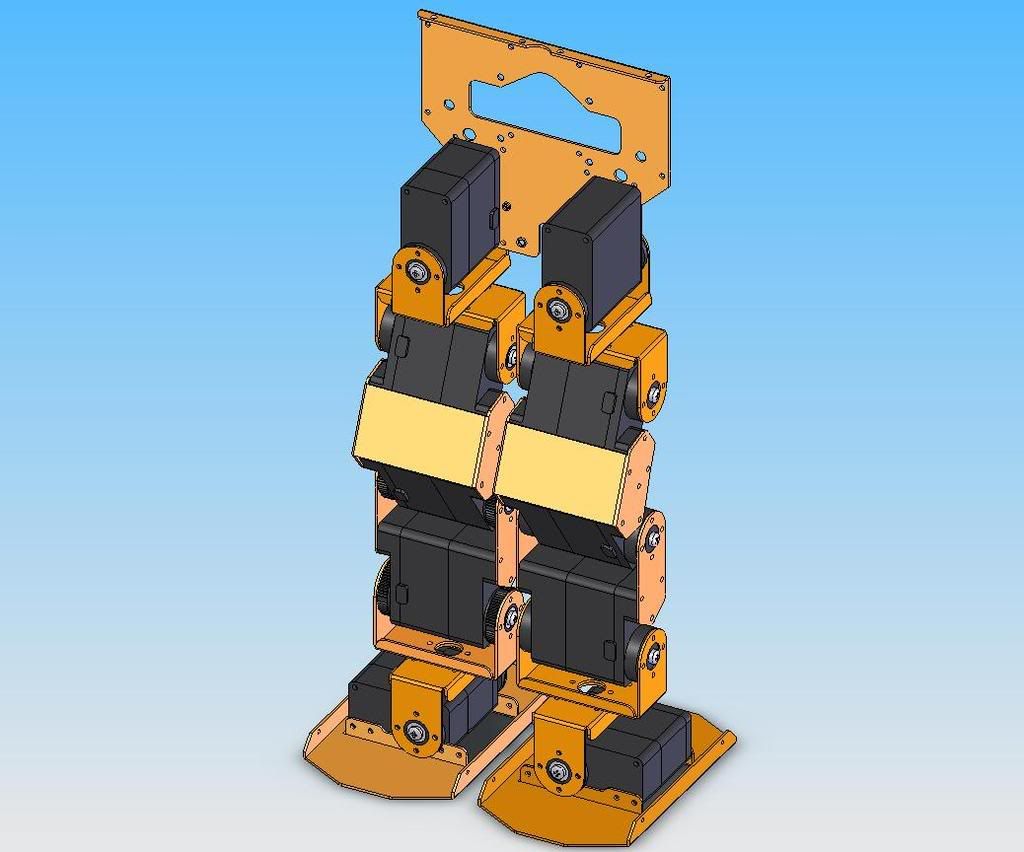
This is as far as I was able to get this week:
http://i225.photobucket.com/albums/dd10 ... leg-p1.jpg
I plan on finishing the front plate and adding the rest of the skeleton and electrics this weeks end.
Then I shall reconfigure, adding the second set of parts. This includes the hands with functional fingers and an opposable thumb; Lightwieght arms with a wrist and a couple of other added DOF for dexterity; Legs with a reverse joint knee set up; Waist/hips with seperate leg rotation hip flexation and a bendable waist. The head will be located differently and completely redesigned to be more robotic/menacing...
This 'bot may not be able to do cartwheels and such but hopefully it'll be able to do alot more that an actual human-oid can do..
I'd like to design around a Lithium based power supply but I have no experiance with what I'd need to buy to make it safe to include this light weight alternative in my design. Any suggestions? I'm having trouble fiding clear answers on the forums, so I thought I'd just outright ask in my own thread. Thank you in advance for any help offered.
I know I've been talking up a storm about what I think I can accomplish but I finally posess the equipment to bring my ideas off of the drawing board and into reality.
I'd like to have a prototype done in time for the Hitec show thats coming up.
http://i225.photobucket.com/albums/dd10 ... leg-p1.jpg
I plan on finishing the front plate and adding the rest of the skeleton and electrics this weeks end.
Then I shall reconfigure, adding the second set of parts. This includes the hands with functional fingers and an opposable thumb; Lightwieght arms with a wrist and a couple of other added DOF for dexterity; Legs with a reverse joint knee set up; Waist/hips with seperate leg rotation hip flexation and a bendable waist. The head will be located differently and completely redesigned to be more robotic/menacing...
This 'bot may not be able to do cartwheels and such but hopefully it'll be able to do alot more that an actual human-oid can do..
I'd like to design around a Lithium based power supply but I have no experiance with what I'd need to buy to make it safe to include this light weight alternative in my design. Any suggestions? I'm having trouble fiding clear answers on the forums, so I thought I'd just outright ask in my own thread. Thank you in advance for any help offered.
I know I've been talking up a storm about what I think I can accomplish but I finally posess the equipment to bring my ideas off of the drawing board and into reality.
I'd like to have a prototype done in time for the Hitec show thats coming up.
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
![]() by MYKL
by MYKL
Wed Feb 06, 2008 7:37 pm
Allrighty.
I've had a day or two to futz around with the standard model and I have to say this little thing is feckin' uh yeah this place is rated 'G' right...
Fun as heck.
I loaded the dance routine from Mr. Bauers site and that little buggers milk was shook. I was able to reset the Zero Point based upon the 'bots performance(s). The wife was even a bit titilated by the 'cuteness'...
Mmmkay. Now to meld the two into one. MUAHAhahAHAHAhha *cough*
I believe this Supernova will suck power like a Banshee does souls so I need to know what voltage NiMh batts the 'bot, its board and its 'muscles' can handle. I believe it is 7.2 Volts Max. PLEASE CORRECT ME IF I AM WRONG!
Also I wanna set it up with wireless comunications to my PC(s). I've been popping around this forum and found a dual serial wireless thing that was probitively expensive. What I'm thinking is that I'll program each controller seperately and use a single Remcon ID setting to activate them both. For instance, if I push the button that tells the machine I wish it to take a step forward the controller for the upper body move the servomotors I've set up to actuate the arms,torso,hands, and maybe even the waist, at the same time the other board recieving the same command actuates the lower extremities, Legs, ankles, hips etc... Each board will have its own Batts and .bas program.
Sound feasable?
I've had a day or two to futz around with the standard model and I have to say this little thing is feckin' uh yeah this place is rated 'G' right...
Fun as heck.
I loaded the dance routine from Mr. Bauers site and that little buggers milk was shook. I was able to reset the Zero Point based upon the 'bots performance(s). The wife was even a bit titilated by the 'cuteness'...
Mmmkay. Now to meld the two into one. MUAHAhahAHAHAhha *cough*
I believe this Supernova will suck power like a Banshee does souls so I need to know what voltage NiMh batts the 'bot, its board and its 'muscles' can handle. I believe it is 7.2 Volts Max. PLEASE CORRECT ME IF I AM WRONG!
Also I wanna set it up with wireless comunications to my PC(s). I've been popping around this forum and found a dual serial wireless thing that was probitively expensive. What I'm thinking is that I'll program each controller seperately and use a single Remcon ID setting to activate them both. For instance, if I push the button that tells the machine I wish it to take a step forward the controller for the upper body move the servomotors I've set up to actuate the arms,torso,hands, and maybe even the waist, at the same time the other board recieving the same command actuates the lower extremities, Legs, ankles, hips etc... Each board will have its own Batts and .bas program.
Sound feasable?
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
![]() by MYKL
by MYKL
Thu Feb 07, 2008 7:09 pm
Hello...
Has anyone used Lithium Ion batts as a powersource? They look to be a bit more stable than the Lipos. The amperage available is quite substantial too.
Claims at the website:
Inherently safe chemistry will not explode or catch fire
Twice the cycle life of competitive Li-poly batteries
50% more power (up to 60C burst) than competitive Li-poly batteries
Balancing connector (compatible only with Sonic Charge (AQR400088))
Fast charge capable - reach 100% state-of-charge in 15 minutes using the Hypersonic ChargeSafe™ balancing fast charge system.
Voltage: 6.6V Will the RN-1 handle this without a regulator?
Capacity: 2300 mAh
Max C-rate cont: 30C
Max C-rate pulse: 60C
Max current cont. : 69 Amps! (Limited by conection)
Max current pulse : 138 Amps
Dimensions : L X Diam : 135MM X 28MM
Weight : 155g
Has anyone used Lithium Ion batts as a powersource? They look to be a bit more stable than the Lipos. The amperage available is quite substantial too.
Claims at the website:
Inherently safe chemistry will not explode or catch fire
Twice the cycle life of competitive Li-poly batteries
50% more power (up to 60C burst) than competitive Li-poly batteries
Balancing connector (compatible only with Sonic Charge (AQR400088))
Fast charge capable - reach 100% state-of-charge in 15 minutes using the Hypersonic ChargeSafe™ balancing fast charge system.
Voltage: 6.6V Will the RN-1 handle this without a regulator?
Capacity: 2300 mAh
Max C-rate cont: 30C
Max C-rate pulse: 60C
Max current cont. : 69 Amps! (Limited by conection)
Max current pulse : 138 Amps
Dimensions : L X Diam : 135MM X 28MM
Weight : 155g
"Somnium est ubi nos ipsi primas agimus partes"
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047
"There is a dream we are part of."
http://robosavvy.com/forum/viewtopic.php?p=13396#13396
http://robosavvy.com/forum/viewtopic.php?p=14047#14047