Customised (Nameless) Bioloid
Customised (Nameless) Bioloid
![]() by Dimitris
by Dimitris
Wed Apr 08, 2015 9:56 pm
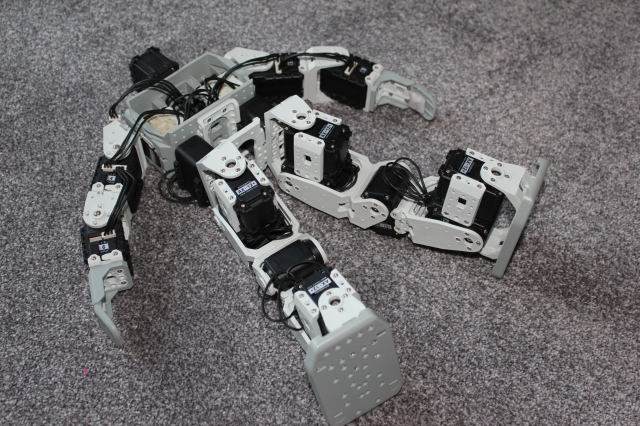
It's been ages since I posted anything on this forum, but I thought the time had finally come, to get my dusty Bioloid out of the cupboard and get it to do something cool! I had played around with various Embedded C code on the CM-5 in the past, but never managed to get any serious project off the ground. This is now my attempt to do this!
Although I don't have any specific goals at the moment, the general idea is to build an autonomous Bioloid with some good walking gaits working in parallel with some add-on sensors, as my Bioloid is build from the discontinued Comprehensive kit which had very little in terms of sensors.
In terms of additional hardware, I have currently chosen:
Some current software I have chosen:
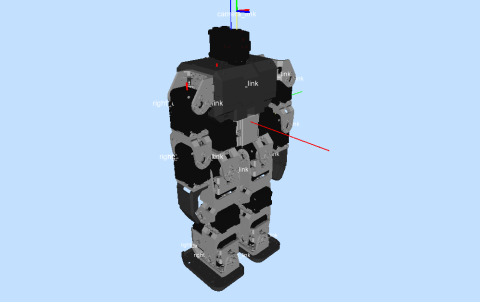
Currently the project is in its infancy, so I've only just got the main hardware components and played around with the sensors. Most progress has been done with representing the Bioloid in ROS.
I will be documenting the progress as much as I can on my blog.
Also, naming suggestions are welcome, as I haven't given my Bioloid a name yet, and feel that this might be bad luck!
Although I don't have any specific goals at the moment, the general idea is to build an autonomous Bioloid with some good walking gaits working in parallel with some add-on sensors, as my Bioloid is build from the discontinued Comprehensive kit which had very little in terms of sensors.
In terms of additional hardware, I have currently chosen:
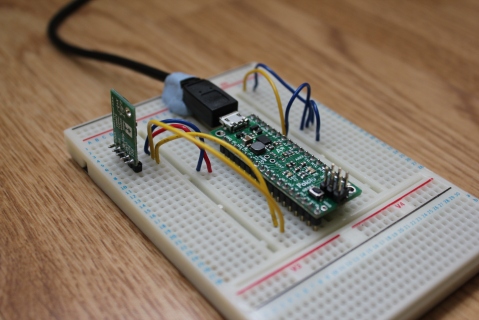
- Arduino-style mini board for sensor data collection
- USB2AX for control via main controller (currently laptop)
- Raspberry Pi 2 as future main controller, once the BIoloid goes autonomous
- IMU for orientation/balance
- Force-sensing resistors in feet
- Large LiPo battery powering everything (bought a 5500mAh monster, which is a bit on the heavy side!)
Some current software I have chosen:
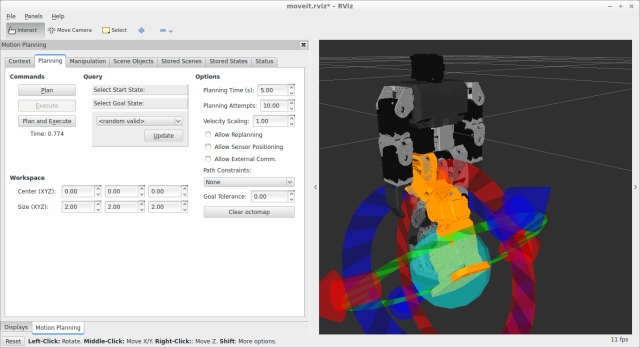
- Linux and ROS as the core platform, hence many of the ROS tools such as RViz, tf, robot state publisher etc.
- MoveIt! for advanced motion
- C++ using Qt IDE for the custom ROS nodes
- Arduino IDE for the Arduino board, using the rosserial library
Currently the project is in its infancy, so I've only just got the main hardware components and played around with the sensors. Most progress has been done with representing the Bioloid in ROS.
I will be documenting the progress as much as I can on my blog.
Also, naming suggestions are welcome, as I haven't given my Bioloid a name yet, and feel that this might be bad luck!

Re: Customised (Nameless) Bioloid
![]() by xevel
by xevel
Wed Apr 08, 2015 11:00 pm
{kind=link}
Hi!
Nice project, but I will extend a word of caution: the servos will simply not be powerful enough to have a walking biped with all of that on it (unless you give it a rickshawto hold the battery...).
A 5500mAh 3S1P Lipo battery should be around 430 to 450g, that's a whole lot of weight... there is a reason they used small 1000mAh batteries in the kit :/
Nice project, but I will extend a word of caution: the servos will simply not be powerful enough to have a walking biped with all of that on it (unless you give it a rickshawto hold the battery...).
A 5500mAh 3S1P Lipo battery should be around 430 to 450g, that's a whole lot of weight... there is a reason they used small 1000mAh batteries in the kit :/
Re: Customised (Nameless) Bioloid
![]() by Dimitris
by Dimitris
Thu Apr 09, 2015 6:38 pm
Thanks! Yes the LiPo weighs just over 400 g, so I'll probably end up getting one in the 1000-2000 range. The Raspberry and other electronics however probably don't weigh much more than the CM-5 and its case, so if a smaller battery is used, overall the Bioloid shouldn't struggle too much.
I might be able to add a small webcam in the future, but a Kinect is probably pushing the weight limit.
I might be able to add a small webcam in the future, but a Kinect is probably pushing the weight limit.
Re: Customised (Nameless) Bioloid
![]() by limor
by limor
Thu Apr 16, 2015 4:08 pm
nice project! please post more about your experience with RVIS graphic interface and importing the model
Re: Customised (Nameless) Bioloid
![]() by Dimitris
by Dimitris
Sun Dec 17, 2017 12:42 pm
It has been ages, but if people are still interested you can follow the progress since this last post here:
https://dxydas.com/category/robotics/bioloid-project/
Some new points:
[*] ROS and MoveIt! integration
[*] AX-12 position controller compatible with ROS
[*] Skeleton interface with Gazebo
[*] Custom servo interface written in Qt (C++)
[*] Additional sensors and electronics
https://dxydas.com/category/robotics/bioloid-project/
Some new points:
[*] ROS and MoveIt! integration
[*] AX-12 position controller compatible with ROS
[*] Skeleton interface with Gazebo
[*] Custom servo interface written in Qt (C++)
[*] Additional sensors and electronics