RoboPlus - The new software that replaces BCP/Motion Edit,..
![]() by PedroR
by PedroR
Wed Aug 05, 2009 4:46 am
I am currently at the Robotis office in Seoul as I write this post
We are going through a session about Roboplus.
In any case, just to let you know about my experience: You need firmware 1.9xxx for CM5 for it to work with Roboplus.
That firmware ships with Roboplus itself.
You go to Roboplus Manager, and click on one of the icons on the toolbar that says "Controller Recovery". It will guide you trough a wizard that will install the latest firmware on your Bioloid.
The firmware it installs will be compatible with Roboplus but it might not work with the previous BCP and MotionEditor.
You can downgrade the firmware using the traditional method on Robot Terminal if you wish to return to a previous version.
As a side note, when using Roboplus Task (BCP replacement) check the keyboard shortcuts because they will make your life a lot easier.
I have tested this with Roboplus 1.0.2.7 and Limor's Bioloid (CM5) and it works. You may also need to put the CM5 in management mode (or some other mode; I don't remember now) to be able to start the firmware upgrade wizard.

![]() by PedroR
by PedroR
Wed Aug 05, 2009 9:16 am
ROBOPLUS MANAGER
1)
Using Roboplus with CM5 for the first time:
- You first need to run a firmware update.
- If you want to go back to the old software you can downgrade to old firmwares but you’d have to do it manually.
In Roboplus, firmware update has an automated tool. You can’t select which firmware to use; it will automatically upload the appropriate firmware according to the version of Roboplus you’re running.
2)
Clicking on the “?” will show the information about the latest information available.
3)
The function “Controller Recovery” will always install the latest firmware to work with the current version of Roboplus.
4)
Zig2Serial communication / test mode in Roboplus Manager will be extended with the link to the packet structure.
When you send a packet you should only expect to receive a response when you send a packet that has a meaning to Zigbee.
A new SDK – Remocon SDK – is to be released which contains the packet structure for the remote control as well as packet structure for zigbee.
Also, this new tool lets you setup many of the Zigbee parameters which used to have to be done on Robot terminal but now can be done here.
5)
Actuators are grouped under the tree and you can make to changes to all of them at once.
6)
When seeing the properties for CM510, you have the option to perform a Quick Search or an Advanced / Full Search.
On a quick search it only searches for servos at the specified baud rate.
In Advanced Search, it searches for servos at different baud rates AND automatically sets them to the correct baud rate.
7)
You can use Dynamixel Manager to change the ID now and it won’t let you overlap IDs with other servos that are already connected.
8 )
Pins in A/D ports: Vdd / Gnd / ADC / Output (LED). The 5th pin is unused.
Output can beset High or LOW. High is 5V.
9)
When you are using Zigbee you can use Roboplus Manager to set the own ID and the paired ID on the Zig110.
For the module in the Remote you need to use Zig2Serial.
GENERAL CM510 considerations
10)
Both CM5 and CM510 have 2 UARTS exposed: one for Dynamixels and another for Zigbee.
In the case of CM510 this second UART is the connector on top of the controller where you connect the IR Receiver, the Zigbee module OR you can use that connector to connect any external controller.
Note however that you must respect the Remocon command when sending commands to this UART.
As far as I know there is no way to put the controller in “zombie mode” where it just relays commands from this UART to the Dynamixel bus and feeds the result back here.
10A) Priority of communications:
In CM5 you could be relaying commands from different resources (Zigbee, PC, IR, custom board) all at the same time.
In the new CM510 this is not like this. It uses a priority system where only one method is relaying at a time.
11)
You can remove the Zigbee or the IR and use that connector to connect a custom board to relay commands.
Vcc / GND / RX and TX.
RX and TX are connected to the CPU (not the Dynamixel bus) and thus you can only send commands to the CPU.
ROBOPLUS TASK
12)
Binary operators exist in Roboplus Task.
13)
When using “CUSTOM” devices in Roboplus task, ID and Address can be typed in as Variables as well as numbers.
14)
When you issue a “MOTION PLAY” command, it runs asynchronously.
You can check if the motion has finished playing with a check on “Motion Status”.
15)
To force a motion to STOP playing you do “Motion Page” = 0
16)
In IF statements you can now have multiple conditions: you click on THEN and replace it with && or ||
Pay attention to operator priority and how it evaluates for example
FALSE && TRUE || TRUE = TRUE according to the demo. This is not like C. Also operator association is not possible.
Further docs are to be made available on the way it evaluates conditions.
17)
LOOP can also have multiple conditions. You double click on the line and it will show the “then” word just like in the IFs, so you can add && and ||
18 )
In LOOP FOR the step is ALWAYS +1. It always adds 1 on each iteration.
You cannot have negative steps or steps like 2, 3, etc.
19)
There are no local variables.
All variables are Global. There is only a global lookup table so it doesn’t matter where you use the variable or where you call it.
Variable declaration is not required and a variable starts existing once you assign a value to it.
20)
CALLBACK is a special function that is called by the system every 7.8ms.
There can be only one CALLBACK per program.
It’s called every time a command is sent to update the motion, meaning a motion page Play sends a servo command at every 7.8ms and then the CALLBACK function is invoked.
The callback is always called regardless of being running a motion or not.
21)
The Motion Offset command will change the value with relation to the position programmed in the page: for example -20 will make the servo be moving at -20 degrees from what was programmed in the Motion page for that servo.
In the previous Bioloid offset was used in Motion Editor only. Now you can set offsets in real time from Roboplus Task.
22)
CALL or LOOP are not allowed inside a CALLBACK function.
CALLBACK needs to be short or otherwise it won’t even enter the function or it just hogs all the resources on the robot.
23)
You can only make 2 Dynamixel calls inside a CALLBACK (you can only make 2 communications).
(this is probably due to timing issues).
However you can set as much motion offsets as you’d like.
24)
It has a PRINT command that prints on a terminal window when the program is running.
This can be used for debugging purposes or other purposes.
25)
Timer will run a Timer: you set the initial time and make a WAIT WHILE Timer > 0 if you want to wait that amount of time.
26)
To program remote:
First test for Remocon Arrived. If true test the result of Remocon RXD.
If Remocon RXD = and then you set the Remocon with no buttons selected, that means remocon KEY UP. You can use a Motion Page = 0 to stop
It also good to use an AND mask to filter out additional buttons that may be being pressed but we want to ignore.
ROBOPLUS MOTION
27)
In Roboplus Motion you can copy and paste between Excel and the position list to make calculations in Excel and then bring them back.
28 )
When setting positions in Motion Editor you can enter values like +20, -30 and it will automatically apply those calculations over the value already there.
![]() by Merlin
by Merlin
Wed Aug 05, 2009 3:48 pm
Lucky you to be on Robotis Seul headquarters, I hope you spend wonderful time there.
Thanks for the firmware advice, I will try in a few hours.
I am 100% in agree with you that Roboplus represents huge improvement in the way we may handle the Hardware of Bioloid.
I still have some doubts about sintaxis on the language, the RoboPlus Help option goes to a webpage which is half in Korean and is hard to understand.
Do you know if exists any Help file in English available regarding the programming sintaxis used by Roboplus?
Ok, thanks in advance for your help and best regards on Seul!!!
merlin
![]() by altwolf
by altwolf
Wed Aug 05, 2009 6:28 pm
It doesn't seem to be able to find the firmware file that is needed. Is the firmware file the "CM-5.cm" found here: \RoboPlus\Manager\config?
Any suggestions?
![]() by siempre.aprendiendo
by siempre.aprendiendo
Wed Aug 05, 2009 7:58 pm
PedroR wrote:In any case, just to let you know about my experience: You need firmware 1.9xxx for CM5 for it to work with Roboplus.
That firmware ships with Roboplus itself.
You go to Roboplus Manager, and click on one of the icons on the toolbar that says "Controller Recovery".
Thanks Pedro, it works!
The "Controller Recovery" toolbar button is a bit stealthy or me a little scatterbrained
![]() by PedroR
by PedroR
Thu Aug 06, 2009 3:08 am
With regards to many of your questions regarding Roboplus here is the status:
- The version you found on the Internet is a bit old considering the pace at which they're updating the package (I am now running 1.0.2.8 that I got here at their headquarters).
- With regards to the controller recovery errors someone mentioned I would like to ask if the current firmware on your Bioloid is a standard Robotis firmware or if it's a custom one.
You may be getting that error because you are using a custom firmware and the wizard is unable to find the installed firmware version.
Please confirm this as it may indicate a bug that needs to be fixed in Roboplus.
- With regards to Roboplus Motion and Roboplus Task, I must say I'm in love LOL.
There are many hidden tricks and tweaks you can use that thir chief of R&D taught me in the demo session we had yesterday.
I believe making some screencasts may help with it.
Here are some examples:
- You can copy and paste betwen Motion Editor and Excel and then do all the necessary calculations (to create a symetric postion for example).
I used this a lot to create the motions for "Robosavvy I" the robot I've built while I'm here (using Bioloid Premium) to participate in the Korean Robot Games Festival tomorrow.
This is a really cool feature.
- In Roboplus Task there is the CALLBACK function which is great for balancing scenarios or scenarios when you want to make corrections while the robot is performing any motion or activity. Corrections are made every 8 ms.
- Roboplus Task performs VERY fast on the Robot. I am currently running a task program just to intercat with the remote control (ie an infite loop that checks the keys presse dand plays the appropriate motions) and the speed at which it iterates and how fast it responds is amazing.
I must say my previous point of reference was Robobuilder (I never used BCP) and this one is light years ahead.
- Help files in English are not yet ready.
I can say what I know now: there will be an offline help file and also an ONLINE help website with the most up to date information and reference.
The online help feature was added in 1.0.2.8 (the latest I have) but it's still only in Korean and should be progressivelly translated during the next couple of months.
--
Now for the other part:
Roboplus Task is a BIG software. They took a lot time into making it look very simple but if you start counting the features one by one you'll find a very ambitious project.
It looks like they've been using it themselves for their projects (ie "dogfooding" their product) and think that's why it's so focused and well thought.
It also looks like it's been debugged thoroughly but as we move to other ecosystems and test bases it is expected to find a few bugs.
For example I have the decimal separator as "," and thousand separator as ".". This is standard in Portugal but different from the English standard. This makes Motion Editor and Task go crazy sometimes.
I reported this bug for fixing. I have however been able to work with the suite nevertheless. I just get some annoying popups sometimes.
All in all, I have been able to make my way through programming the robot for KRGF with very little incidents.
Error recovery is well handled in Roboplus so when I stumble into a bug I simple close and restart
They have agreed on releasing the up-to-date version to a select number of users but the only condition is that we keep the Bug reporting organized here in our forum and just send them error/bug reports in a batch, organized way.
I'll upload 1.0.2.8 no later than Tuesday (the day I get back). If I have the time I'll try and upload before that
![]() by altwolf
by altwolf
Thu Aug 06, 2009 4:07 am
PedroR wrote:Hi guys
- With regards to the controller recovery errors someone mentioned I would like to ask if the current firmware on your Bioloid is a standard Robotis firmware or if it's a custom one.
You may be getting that error because you are using a custom firmware and the wizard is unable to find the installed firmware version.
Please confirm this as it may indicate a bug that needs to be fixed in Roboplus.
Hmmm... The Robot terminal reports that I am using firmware ver.1.15. Roboplus Manager tells me I have CM-5, "ver. 1.31 (bootloader)".
![]() by ShreddinPB
by ShreddinPB
Thu Aug 06, 2009 6:48 am
I follow the prompts, it reports the 1.31 bootloader
then on the next screen it gives me this
This is not CM firmware file! [ok]
I click ok and it goes back to the "Controller Firmware Wizard" thing, and the [Next] button is available, i push it and it does nothing.. I cant get to a dialog to pick a new file or anything
and just to make sure.. I restored a bioloid firmware to make sure it was a good one
![]() by PedroR
by PedroR
Thu Aug 06, 2009 9:00 am
Updated version of Roboplus (1.0.2.8).zip, is available here http://robosavvy.com/RoboSavvyPages/Robotis/Roboplus
[ EDIT : when visiting the above link, make sure you download the latest version. As of Sept 15th, the latest available is 1.0.10 but with time others will be available. Make sure you always get the latest ]
This is the version I've been using.
You need to uninstall the old version first and only then, install this one.
With regards to reporting bugs, please follow this procedure:
1) Post bug reports HERE. Do not send emails to Robotis about Roboplus!
It is not officially released yet and you won't get any reply.
2) If you are having problems, upgrading the firmware, use Robot Terminal (the old one) and inform HERE the version numbers of the bootloader and the firmware itself.
3) As a general rule for bug report, indicate this:
- The program hwere the error occurs.
- The steps to reproduce the behaviour
- The expected result and why the end result is wrong / how it differs from the expected result.
I promise we'll collect all ifnormation in a report and send it to Robotis for fixing in future releases.
Again, I repeat,this is not released software yet for Bioloid. It is "Release Candidate" and Robosavvy was authorized to be the first distributor to make distribution of the software for customer testing and discussion.
If you are not willing to accept the bugs the software might still have, please continue using BCP and Motion Editor for now.
We are very happy with this and we hope you make the most out of this pioneering experience :)
As I said, I myself am in love with roboplus :)
![]() by altwolf
by altwolf
Fri Aug 07, 2009 1:22 am
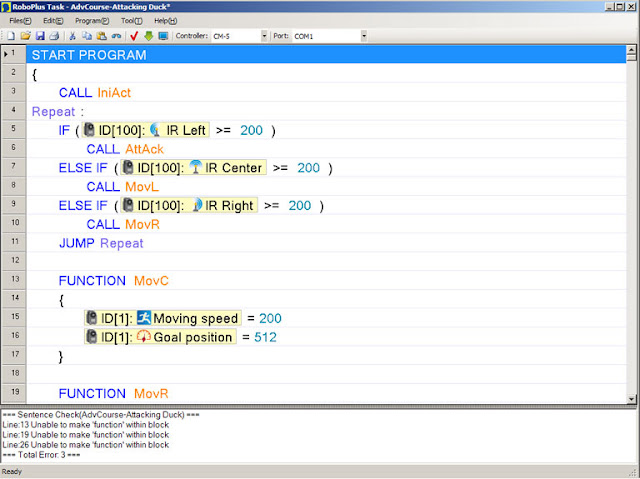
I have been trying to reproduce the "Attacking Duck" program in Roboplus following the example you showed in the very first screenshot in this thread and keep getting this error when I make new functions - "Unable to make function within block."
Here is my RoboPlus Screenshot:
What am I missing? Might be somethign stupid for all I know. Lol.
![]() by PedroR
by PedroR
Fri Aug 07, 2009 1:23 pm
actually the screenshot I used for the sample is wrong/incomplete.
At the time I was trying to make a screenshot and didn't have the time to go thourgh all the testing.
The error you get means this:
- You need to move the FUNCTION defitioons to a place outside the START PROGRAM { .... } END PROGRAM.
It's like C: START PROGRAM would be "main" and all other function declarations should be outside the body of "main".
Also make sure the syntax is correct with regards to the instructions to call the functions. I haven't checked that either.
Roboplus Task is not very good at importing old BCP programs....
I think it's because some of the constructs are not compatible but I don't know BCP that well to be able to say this with certainty.
Also, pay attention to the use of RETURN as well. It can ONLY be used inside a FUNCTION declaration.
Using return outside a FUNCTION may cause "unexpected results" quoting the Robotis engeneers.
![]() by altwolf
by altwolf
Fri Aug 07, 2009 7:30 pm
i-Bot wrote:Pedro,
Are you saying there is a close curly brackets missing on line 12 ?
What he means is that you need to create your Functions OUTSIDE of the usual Start {....}End part of the program.
For Example, I cut my functions from where they were located "inside" the "Start Program {....}End" part of the program and pasted them to the TOP of the Page ABOVE where it says "Start Program". This got rid of the error "Unable to make function inside block.".
Functions apparently have to be placed outside the "Start Program{...}End" BLOCK of code.