Bioloid (20 DOF) with N900 head
Updated
![]() by sascha
by sascha
Tue Apr 05, 2011 8:45 pm
Hi, I updated my mobile phone robot. The batteries were moved to the feet and the torso was updated. Phone has been rotated compared to initial design.
Following software runs now on the N900:
- ROS
- OpenCV
- gstreamer (640x480 H.264)
- fcam (used intitially for autofocus etc)
- VNC / SSH (for remote access)
I wrote an ROS node for the N900 accelerometer and played a little bit with OpenCV. The face detection speed on the N900 was a bit disappointing though (0.25 fps) and I decided to stream the video to my PC (using gstreamer for which exists an ROS integration). Streaming causes only about 20% CPU utilization (640x480 resolution / H.264 / 1500 KB/s) on the N900.
Less complex tasks like color based tracking should be able to run on the robot itself with acceptable speed.
Next thing I will work on is an URDF model for ROS.
Here are some pics:




Following software runs now on the N900:
- ROS
- OpenCV
- gstreamer (640x480 H.264)
- fcam (used intitially for autofocus etc)
- VNC / SSH (for remote access)
I wrote an ROS node for the N900 accelerometer and played a little bit with OpenCV. The face detection speed on the N900 was a bit disappointing though (0.25 fps) and I decided to stream the video to my PC (using gstreamer for which exists an ROS integration). Streaming causes only about 20% CPU utilization (640x480 resolution / H.264 / 1500 KB/s) on the N900.
Less complex tasks like color based tracking should be able to run on the robot itself with acceptable speed.
Next thing I will work on is an URDF model for ROS.
Here are some pics:


Re: Updated
![]() by torne
by torne
Mon Aug 08, 2011 10:57 am
Salut Sascha,
bonne idée les batterie dans les pieds.
j'aurai voulu savoir si le robot arrive a marcher sans difficultées
avec le poids des batteries.
pourriez vous mettre une ou deux photos de votre montage des pieds.
Merci
bonne idée les batterie dans les pieds.
j'aurai voulu savoir si le robot arrive a marcher sans difficultées
avec le poids des batteries.
pourriez vous mettre une ou deux photos de votre montage des pieds.
Merci
Foot photos
![]() by sascha
by sascha
Sun Aug 21, 2011 9:11 pm
{kind=link}
{kind=link}
{kind=link}
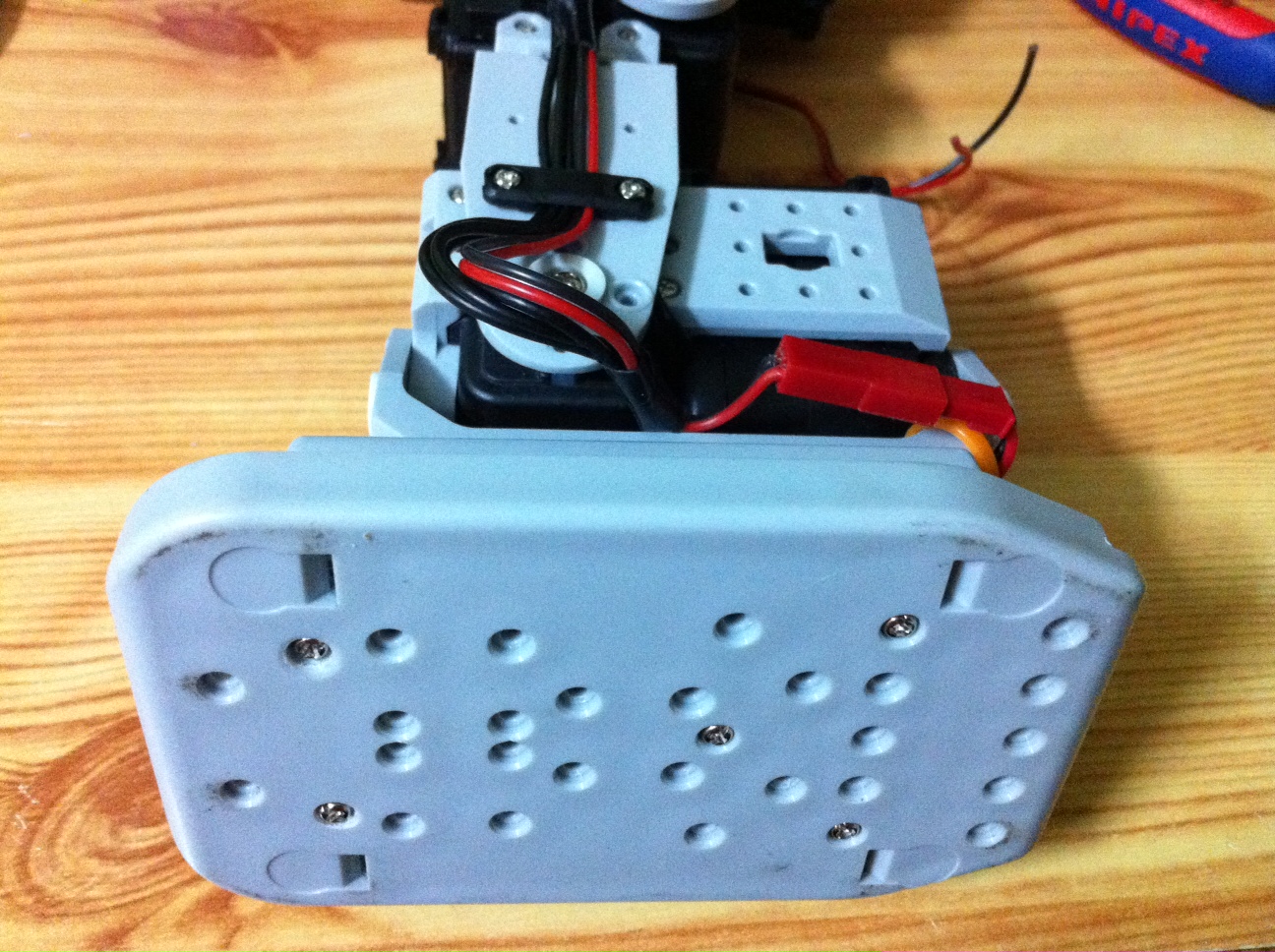
Hi torne,
here are some close-up shots of the lipo foots.
http://robosavvy.com/Builders/sascha/photo-foot01.JPG
http://robosavvy.com/Builders/sascha/photo-foot02.JPG
http://robosavvy.com/Builders/sascha/photo-foot03.JPG
Mounting was quite easy, no problem a small drill can't solve.
Regards, Sascha
here are some close-up shots of the lipo foots.
http://robosavvy.com/Builders/sascha/photo-foot01.JPG
http://robosavvy.com/Builders/sascha/photo-foot02.JPG
http://robosavvy.com/Builders/sascha/photo-foot03.JPG
Mounting was quite easy, no problem a small drill can't solve.
Regards, Sascha
Re: Foot photos
![]() by torne
by torne
Mon Aug 22, 2011 2:09 pm
Salut Sascha,
Merci pour les photos ,je vais faire le montage
Torne
Merci pour les photos ,je vais faire le montage
Torne
Mobile phone holder
![]() by sascha
by sascha
Tue Aug 23, 2011 9:22 am
The shell holding the N900 is 2mm carbon fiber. I used memory carbon, which can be formed in 2 dimensions after heating up.
The upper part of the mobile phone is just covered with a (carbon pattern) adhesive film, to match the colour of the actual bracket.
The upper part of the mobile phone is just covered with a (carbon pattern) adhesive film, to match the colour of the actual bracket.