A.P.U. possible with Bioloid?
A.P.U. possible with Bioloid?
![]() by jigsaw
by jigsaw
Tue Oct 31, 2006 6:01 am
Greetings all.
I am interested in building a hobby robot but would like some builders to comment on a project I had in mind.
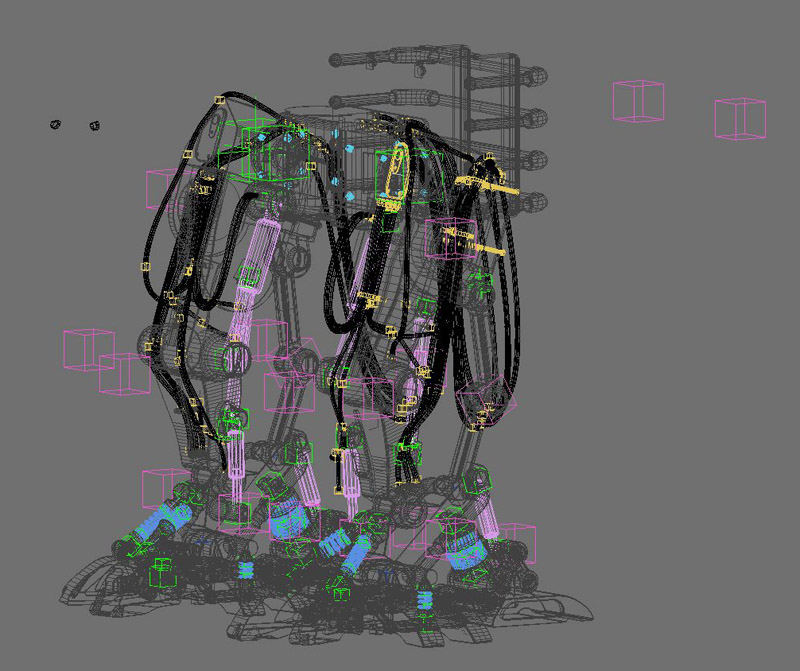
Below is a picture of a CG A.P.U.

Though it is Bi-pedal, I am not sure it is doable due to it's wide hip/leg separation. It seems that alot of the robot kits have narrow hips and thus their legs are very close together. Does any think this is too wide to be able to work? Would the Bioloid Kit have enough torque or speed to pull off a nice smooth walk or gait? Here's an example:
http://www.jeansimard.com/media/apu_wp.mov
For me, this type of robot would be the design I would like to build. Anyone else like-minded?
Any input is appreciated, thanks.


I am interested in building a hobby robot but would like some builders to comment on a project I had in mind.
Below is a picture of a CG A.P.U.
Though it is Bi-pedal, I am not sure it is doable due to it's wide hip/leg separation. It seems that alot of the robot kits have narrow hips and thus their legs are very close together. Does any think this is too wide to be able to work? Would the Bioloid Kit have enough torque or speed to pull off a nice smooth walk or gait? Here's an example:
http://www.jeansimard.com/media/apu_wp.mov
For me, this type of robot would be the design I would like to build. Anyone else like-minded?
Any input is appreciated, thanks.

Re: A.P.U. possible with Bioloid?
![]() by Juha
by Juha
Tue Oct 31, 2006 12:43 pm
jigsaw wrote:http://www.jeansimard.com/media/apu_wp.mov
Looking at this video, I don't think it could walk at least the way it does in the video. It would probably fall sideways.

![]() by Joe
by Joe
Tue Oct 31, 2006 7:53 pm
That's going to be a tough one. It's not really the wide separation of the hips that matters so much as the separation of the feet. These legs have those side toes, which will certainly help (particularly the inner toes). But you still have to keep your center of gravity over the supporting foot most of the time.
I think it could be done if the hips have 2 DOF each, such that they can bend the legs inward a bit. The walk sequence would involve leaning over the supporting fit, lifting the forward foot, then falling toward that foot, hopefully putting it down in time to not fall over.
I don't think Bioloid's going to result in anything that looks like this, though — maybe you should be posting in the home-built forum?
Best,
— Joe
I think it could be done if the hips have 2 DOF each, such that they can bend the legs inward a bit. The walk sequence would involve leaning over the supporting fit, lifting the forward foot, then falling toward that foot, hopefully putting it down in time to not fall over.
I don't think Bioloid's going to result in anything that looks like this, though — maybe you should be posting in the home-built forum?
Best,
— Joe
![]() by limor
by limor
Tue Oct 31, 2006 9:31 pm
Great looking model!
This robot 3 times the size of a human is not going to happen. Fabrication of parts and materials is going to be too expensive and the physics of such a large beast are quite different than what intuition may suggest.
If it is would be about 1ft tall then it may be possible to fabricate the body parts with plastic and vacuum forming. Another issue is that there are quite a lot of moving parts and that foot suspension thing looks quite complicated to implement in small scale. Also those long arms are not really practical. think of the huge torque applied to the elbow every time the robot moves.
If you upload a low-poly skeletal mesh model of the robot (in any format that can be exported to ogre3d), I may be able to throw some physics at it.
This robot 3 times the size of a human is not going to happen. Fabrication of parts and materials is going to be too expensive and the physics of such a large beast are quite different than what intuition may suggest.
If it is would be about 1ft tall then it may be possible to fabricate the body parts with plastic and vacuum forming. Another issue is that there are quite a lot of moving parts and that foot suspension thing looks quite complicated to implement in small scale. Also those long arms are not really practical. think of the huge torque applied to the elbow every time the robot moves.
If you upload a low-poly skeletal mesh model of the robot (in any format that can be exported to ogre3d), I may be able to throw some physics at it.
![]() by jigsaw
by jigsaw
Wed Nov 01, 2006 3:55 am
The fulll scale robot was just an example. I would be adding the Bioloid servos to an 18 inch tall frame of the APU, to give it power to be able to walk and turn at the waist.
It seems like the walk is the trickiest part of it, perhaps I can find a way to add more stability to the feet by increasing its footprint horizontally. Well, just thought I would share. Logically, I don't see why It couldn't be done successfully.
Oh and check out this animatic..... Don't you just love it!
http://www.jeansimard.com/media/apu_hirez02_gun_fire.mov
-cheers!
It seems like the walk is the trickiest part of it, perhaps I can find a way to add more stability to the feet by increasing its footprint horizontally. Well, just thought I would share. Logically, I don't see why It couldn't be done successfully.
Oh and check out this animatic..... Don't you just love it!
http://www.jeansimard.com/media/apu_hirez02_gun_fire.mov
-cheers!
