Sensor usage with CM-5
![]() by sdeba
by sdeba
Wed Nov 16, 2011 11:24 pm
The first sensor will be gyroscope. It is relatively cheap and will be great addon to the humanoid robot.

![]() by i-Bot
by i-Bot
Thu Nov 17, 2011 12:49 pm
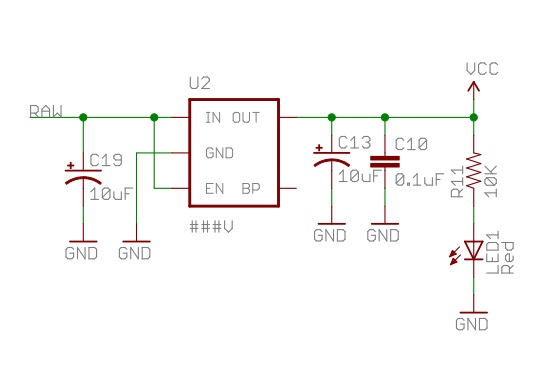
The Vcc pin on the Pro Mini is thus an output in our case at 5V provided through the regulator.
http://arduino.cc/en/uploads/Main/Arduino-Pro-Mini-schematic.pdf
Did you already chose a Gryo ? the analog are usually easier, but the digital more accurate. It is likely the gyro will be designed for 3.3V, so additional regulator and level conversion may be required. We chose the 5V version of the arduino since it is faster, and meets the voltage level requirements of the dynamixel bus. The 3.3V version is out of specification for the Dynamixel bus, but does still work, the Bioloid 5/6 DOF IMU from Jon runs at 3.3V.
![]() by i-Bot
by i-Bot
Thu Nov 17, 2011 1:04 pm
- Code: Select all
Bioloid IO Pro Mini Port Comment
Analog 0 A0 A0
Analog 1 A1 A1
Analog 2 A2 A2
Analog 3 A3 A3
Analog 4 A4 A4
Analog 5 A5 A5
Digital 0 D5 D5
Digital 1 D6 D6
Digital 2 D7 D7
Digital 3 SCK B5 See note below
Motor 0 D9 B1
Motor 1 D10 B2
Timer_UART D3 D3 Serial Debug output pin
SCK pin is used by the green led on the Pro Mini, and I changed it to be the status LED in the code. I did not change Digital 3 to swap over. You can use pin D2 or other free pin as digital 3 if you change the code.
![]() by sdeba
by sdeba
Thu Nov 17, 2011 11:28 pm
VCC pin role is now clear to me, it is an output voltage of 5V.
I am thinking about this gyro: http://www.sparkfun.com/products/9801
Mainly because it is easy accessible in my country, but it has 3,3V so I'll must convert 5V to 3,3V. To do this I found this: http://www.sparkfun.com/products/8745 .Will it be good?
Thank you for pins mapping table.
![]() by i-Bot
by i-Bot
Fri Nov 18, 2011 10:16 am
The gyro and converter you describe are good. If you want to add accelerometer later, then the sparkfun 6 DOF digital combo board adds ADXL345 accelerometer to the same gyro with cost and space savings.
![]() by sdeba
by sdeba
Mon Nov 21, 2011 10:47 pm
All parts came today. I've already soldered all needed pins and tested the board. Now I would like to build a prototype with all needed connections done etc. I'll buy gyroscope (I'm considering also 6 DOF IMU as you suggested) at the beggining of December (now I'm out of money) and then I'll be able to test it properly. In my pack there was 10x 230 Ohm resistors and 10x red leds (you said something about protection so maybe it would be useful).
Correct me if my thoughts are wrong:
- RAW pin should be connected to middle pins of Dynamixel Bus
- Pins at Dynamixel Bus on the right should be connected do GRD pin on Arduino (does it matters which one, the left GRD or right GRD on Arduino board?)
- Left pin of Dynamixel bus should be connected to TXO pin on Arduino
- VCC pin should be connected to AX Bus <-> GRD and AX Bus <-> TXO cables
And probably that's all, Am I right?
![]() by i-Bot
by i-Bot
Tue Nov 22, 2011 5:28 pm
Adding the protection is advised, but if not then.
- RAW pin should be connected to middle pins of Dynamixel Bus
- Pins at Dynamixel Bus on the right should be connected do GND pin on Arduino (either on is OK, they are connected on Arduino.
- Left pins of Dynamixel bus should be connected to TXO pin on Arduino
If you add protection then
- RAW pin should be connected to middle pins of Dynamixel Bus
- Pins at Dynamixel Bus on the right should be connected do GND pin on Arduino (either on is OK, they are connected on Arduino.
- Left pins of Dynamixel bus should be connected to TXO pin on Arduino via a 47 ohm resistor
- Add diode from left pin of Dynamixel bus(anode) to VCC on Arduino(cathode)
- Add diode from left pin of Dynamixel bus(cathode) to GND on Arduino(anode)
![]() by sdeba
by sdeba
Fri Nov 25, 2011 1:59 pm
![]() by sdeba
by sdeba
Fri Nov 25, 2011 2:26 pm
What about diodes used for protection, can it be any type of diodes?
![]() by i-Bot
by i-Bot
Fri Nov 25, 2011 4:10 pm
http://robosavvy.com/store/product_info ... cts_id/318
though a smaller one would be better given the small current required.
The diode should be 1N4148 or similar. Schottky is OK. Proper protection diodes are better but usually surface mount. Power diodes are not good due to high capacitance.
I just saw this IMU which has regulator and level converter built in, also a 3 axis magnetometer.
http://www.pololu.com/catalog/product/1265
![]() by sdeba
by sdeba
Fri Nov 25, 2011 6:31 pm
How about accesibility of all this modules while programming? Is reading state of IMU from Polulu much different than from SparkFun IMU? Where I can find those libraries for Bioloid CM-5 programming?
![]() by i-Bot
by i-Bot
Sat Nov 26, 2011 11:59 am
Gryo is best for making corrections to robot angle when encountering uneven ground or external forces. The drift however can be a problem if not cancelled, causing the robot to lean.
Reading robot pitch and roll angle from the accelerometer is good for detecting fallen and getting up in the right direction. Accelerometers detect accelerations other than gravity, so are prone to noise when in motion, so not so good for balance.
In higher end IMU, the mutiple sensor outputs are mixed together to give best accuracy and response for measuring both angle and angular velocity. The mixing is usually done with a Kalman or a complimentary filter.
Magnetometer can also be mixed to get an accurate yaw angle, but sensor placement is important due to servo motors.
Both IMU can are I2C, so can use the HUV or similar I2C code, the actual libraries for the gyro and magnetometer will need translating over from existing Arduino libraries. To the CM-5 and Robotask the different sensors usually appear as custom dynamixel memory values for X,Y, and Z, gyro and accelerometer readings.