Hip Positioning
Hip Positioning
![]() by NewBreedWarrior
by NewBreedWarrior
Thu Jun 07, 2007 9:42 am
I have been looking at various hip designs, The two major I have seen are, Box servos or a stack of two servos. The other being a T shape creating a zero displacement or center as if the axis of 2 joints are a + sign. Trying to keep as close to human as possible would there be any other ways? Achieving hip rotation 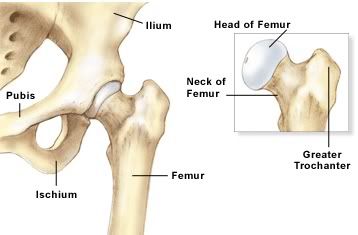 [/img]
[/img]
[/img]In the fell clutch of circumstance
I have not winced nor cried aloud.
Under the bludgeonings of chance
My head is bloody, but unbowed.
I have not winced nor cried aloud.
Under the bludgeonings of chance
My head is bloody, but unbowed.

![]() by AI-Bot
by AI-Bot
Thu Jun 07, 2007 4:27 pm
HI
Well, in my opinion if you want the robot to walk close to human.
You will need to add two servo where the head of Femur is.
One for rotation and one go side way.
And finally you need one servo for waist twist...
If you look a human walking in slow motion, you will notice that we twist our waist as we walk.
I think if you make a T shape, I think it is actually harder on the center of gravity...if you program it wrong or NOT using with a gyro. Also you will lose out on the torque.
But nevertheless, T shape is very interesting.... I like to see that too.
Well, in my opinion if you want the robot to walk close to human.
You will need to add two servo where the head of Femur is.
One for rotation and one go side way.
And finally you need one servo for waist twist...
If you look a human walking in slow motion, you will notice that we twist our waist as we walk.
I think if you make a T shape, I think it is actually harder on the center of gravity...if you program it wrong or NOT using with a gyro. Also you will lose out on the torque.
But nevertheless, T shape is very interesting.... I like to see that too.
![]() by Stevken
by Stevken
Wed Jun 27, 2007 5:18 am
NewBreedWarrior
It's been awhile sense this post but here a robot you should take a look at, it's prettycool.
http://www.takanishi.mech.waseda.ac.jp/ ... /index.htm
Ken
It's been awhile sense this post but here a robot you should take a look at, it's prettycool.
http://www.takanishi.mech.waseda.ac.jp/ ... /index.htm
Ken

![]() by NewBreedWarrior
by NewBreedWarrior
Wed Jun 27, 2007 8:43 am
Haha,
Wow thanks for this site Stevken, I see what you are showing me... The trunk has individual movement and yaw, that really makes some sense. Beyond all that it is in great detail of how to achieve its movements.
Wow thanks for this site Stevken, I see what you are showing me... The trunk has individual movement and yaw, that really makes some sense. Beyond all that it is in great detail of how to achieve its movements.
In the fell clutch of circumstance
I have not winced nor cried aloud.
Under the bludgeonings of chance
My head is bloody, but unbowed.
I have not winced nor cried aloud.
Under the bludgeonings of chance
My head is bloody, but unbowed.