air powered home build
air powered home build
![]() by sthmck
by sthmck
Tue Sep 25, 2007 5:01 pm
Hey, I am in the process of designing a humanoid robot, that uses pneumatic actuators. It is a pretty adventurous project, and has the potential to sit and gather dust half way through.
I am planning on using air muscles, and a custom valve system. I have some of the system in a CAD program right now and I am working on the rest of it.
The robot will be somewhat bigger than most robo-one humanoids, probably around three and a half feet. I am not sure about the wieght right now, but it should be low because the air muscles dont way much.
My idea is to develop the legs separately from the upper body. This way I will be able to test them independently of each other. I am going to try develop a dynamic walking gait using a design similar to the one at Delft. I plan on going further with that design, so that it can control direction and speed. Other robots built on this design can't do this yet.
I will probably use aluminum for the prototype model and then start making parts out of other materials as I begin to modify the design. My goal is to make it light, in an effort to cut down on energy consumption.
I hope to have some pics and screen shots up by the end of the week so that everyone can see the general idea. I am dont have much money as of right now to work on this, but I am going to present it as a research project at my university. I will see how that goes. Please feel free to ask question and comment on anything. I am sorry if this seems to be a vague.
Thanks.
I am planning on using air muscles, and a custom valve system. I have some of the system in a CAD program right now and I am working on the rest of it.
The robot will be somewhat bigger than most robo-one humanoids, probably around three and a half feet. I am not sure about the wieght right now, but it should be low because the air muscles dont way much.
My idea is to develop the legs separately from the upper body. This way I will be able to test them independently of each other. I am going to try develop a dynamic walking gait using a design similar to the one at Delft. I plan on going further with that design, so that it can control direction and speed. Other robots built on this design can't do this yet.
I will probably use aluminum for the prototype model and then start making parts out of other materials as I begin to modify the design. My goal is to make it light, in an effort to cut down on energy consumption.
I hope to have some pics and screen shots up by the end of the week so that everyone can see the general idea. I am dont have much money as of right now to work on this, but I am going to present it as a research project at my university. I will see how that goes. Please feel free to ask question and comment on anything. I am sorry if this seems to be a vague.
Thanks.

![]() by sthmck
by sthmck
Thu Sep 27, 2007 4:32 am
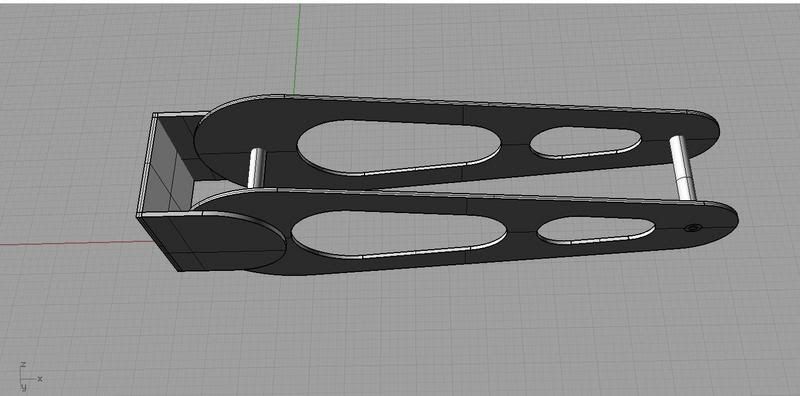
Here is a pic of the upper arm and part of the shoulder. Sorry that it isnt much. I am working with a new program here. Not quite used to it and it take me forever to get anything done in it. I didnt include acuators, air lines, or air manifolds. I will work on it the rest of this week. Hopefully I will have the arm finished by the end of the week.
![]() by Humanoido
by Humanoido
Sat Sep 29, 2007 7:08 am
sthmck, this is an amazing project! Many of the worlds' first humanoids were pneumatically controlled. It's "tried and true" technology and has been applied to the auto and manufacturing industry for years. Will this be an autonomous humanoid with its own contained air supply? Please keep us updated with your projects.
humanoido
humanoido

what valves?
![]() by Joe
by Joe
Wed Nov 14, 2007 10:48 pm
I've looked into pneumatic robots a bit, but found it extremely difficult to find good pneumatic valves at a reasonable price. Can you tell us more about the valves you are planning on using?
Also, before you put a lot of effort into designing a full biped (or even set of legs), you should set up a single joint and verify that you can control it with the speed, power, and precision you expect.
Best,
— Joe
Also, before you put a lot of effort into designing a full biped (or even set of legs), you should set up a single joint and verify that you can control it with the speed, power, and precision you expect.
Best,
— Joe